RP2040-GEEK
说明
| ||||||||||||||||||||||
| ||||||||||||||||||||||

产品概述
RP2040-GEEK 是一款微雪 (Waveshare) 为极客设计的开发板,板载USB-A公口、1.14寸LCD屏幕、Mirco SD卡槽等外设,使用不同固件可以提供 SWD 接口、UART 接口和 I2C 接口,可以为你的项目提供无限可能
产品特性
- 采用 Raspberry Pi 官方自主设计的 RP2040 微控制器芯片
- 双核 ARM Cortex M0+ 处理器,运行频率高达 133MHz 灵活时钟
- 内置 264KB 的 SRAM 和 4MB 的板载 Flash
- 板载 1.14 英寸 240×135 像素的 65K 彩色 IPS LCD 显示屏
- 板载 3PIN SWD 接口,用于连接被调试的目标板
- 标准 CMSIS-DAP 接口,可用于调试大部分基于 ARM 的微控制器
- 适用 OpenOCD 和其他支持 CMSIS-DAP 的调试工具
- 采用树莓派同类型的 3PIN 调试接口规范
- 板载 3PIN UART 接口,可用于实现 USB 串口转接器的功能
- 板载 4PIN I2C接口,可用于测试目标板
- 配备塑料外壳以及相关连接线材
- 使用开源固件,升级固件更方便
尺寸图

Pico快速上手
固件下载
| ||
|


基础介绍
MicroPython系列
安装Thonny IDE
为了方便在电脑上使用 MicroPython 开发 Pico/Pico2 板,建议下载 Thonny IDE
- 下载 Thonny IDE 并按照步骤安装,安装包均为 Windows 版本,其他版本请参考 Thonny 官网
- 安装完成之后,第一次要配置语言和主板环境,由于我们是为了使用 Pico/Pico2,所以注意主板环境选择 Raspberry Pi 选项

- 配置 Micrpython 环境及选择 Pico/Pico2 端口
- 先将 Pico/Pico2 接入电脑,左键点击 Thonny 右下角的配置环境选项--》选择 configture interpreter
- 在弹出的窗口栏中选择 MicroPython(Raspberry Pi Pico),同时选择对应的端口


烧录固件
- 点击 ok 后返回到 Thonny 主界面,下载对应的固件库并烧录到设备中,然后点击停止按钮,在 Shell 窗口中即可显示当前使用到的环境
- 注意:Pico 系列版型可直接使用 Micropython 官方提供的固件,RP 系列版型请使用下方或程序包中的固件
- 最新版本固件编译步骤
- Pico/Pico2 在 Windows 下载固件库方法: 按住 BOOT 键后连接电脑后,松开 BOOT 键,电脑会出现一个可移动磁盘,将固件库复制进去即可
- RP2040/RP2350 在 Windows 下载固件库方法: 连接电脑后,同时按下 BOOT 键跟 RESET 键,先松开 RESET 键再松开 BOOT 键,电脑会出现一个可移动磁盘,将固件库复制进去即可(用 Pico/Pico2 的方式也可以)

讲解视频
【MicroPython】machine.Pin类函数详解
【MicroPython】machine.PWM类函数详解
【MicroPython】machine.ADC类函数详解
【MicroPython】machine.UART类函数详解
【MicroPython】machine.I2C类函数详解
【MicroPython】machine.SPI类函数详解
【MicroPython】rp2.StateMachine类函数详解
C/C++系列
对于 C/C++,建议使用 Pico VSCode 进行开发,这是一款 Microsoft Visual Studio Code 扩展,旨在让您在为 Raspberry Pi Pico 系列开发板创建、开发和调试项目时更加轻松。无论您是初学者还是经验丰富的专业人士,此工具都可以帮助您自信而轻松地进行 Pico 开发。下面我们介绍如何安装该扩展并使用。
- 官网教程:https://www.raspberrypi.com/news/pico-vscode-extension/
- 本教程适用于树莓派Pico、Pico2与本公司开发的RP2040、RP2350系列开发板
- 开发环境默认以 Windows11 为例,其他环境请参考官网教程进行安装
安装VSCode
-
首先,点击下载 pico-vscode 程序包,解压并打开程序包,双击安装 VSCode

注意:如果已安装 vscode 注意检查版本是否为 v1.87.0 或更高版本




安装扩展
-
点击扩展,选择从 VSIX 安装

-
选择 vsix 后缀的软件包,点击安装

-
随后 vscode 会自动安装 raspberry-pi-pico 及其依赖扩展,可以点击刷新查看安装进度

-
右下角显示完成安装,关闭 vscode





配置扩展
-
打开目录 C:\Users\用户名,将整个 .pico-sdk 拷贝至该目录

-
拷贝完成

-
打开 vscode,对 Raspberry Pi Pico 扩展中各个路径进行配置

配置如下:Cmake Path: ${HOME}/.pico-sdk/cmake/v3.28.6/bin/cmake.exe Git Path: ${HOME}/.pico-sdk/git/cmd/git.exe Ninja Path: ${HOME}/.pico-sdk/ninja/v1.12.1/ninja.exe Python3 Path: ${HOME}/.pico-sdk/python/3.12.1/python.exe



新建工程
-
配置完成,测试新建工程,输入工程名、选择路径后点击 Creat 创建工程
测试官方示例,可以点击工程名旁的 Example 进行选择
-
创建工程成功



编译工程
-
选择SDK版本

-
选择 Yes 进行高级配置

-
选择交叉编译链,13.2.Rel1 适用 ARM 核,RISCV.13.3 适用 RISCV 核,这里根据您的需求任意选择其中一个即可

-
CMake 版本选择 Default(前面配置的路径)

-
Ninja 版本选择 Default

-
选择开发板

-
点击 Complie 进行编译

-
成功编译出 uf2 格式文件即可









烧录固件
这里提供两种方法烧录固件
-
使用pico-vscode插件烧录固件
将开发板连接到电脑上,点击Run直接烧录固件
-
手动烧录固件
1.按住Boot按键 2.将开发板连接到电脑上 3.然后会电脑会将开发板识别成一个U盘设备 4.将.uf2文件复制到U盘中,设备就会自动重启,程序烧录成功

导入工程
-
选择工程目录,导入工程

- 导入工程的 Cmake 文件不能有中文(包括注释),否则可能导致导入失败
-
导入自己的工程需要在 Cmake 文件中加一行代码,才能正常切换 pico 和 pico2,否则即使选择 pico2,编译得到的固件仍是适用于 pico 的

set(PICO_BOARD pico CACHE STRING "Board type")


更新扩展
-
离线包中的扩展版本为0.15.2,安装完成后,更新至最新版本


Arduino IDE 系列
安装Arduino IDE
-
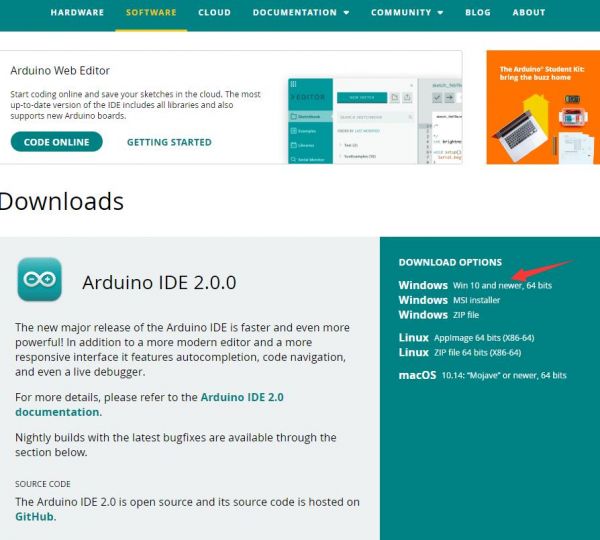
首先到Arduino官网下载 Arduino IDE 的安装包。
-
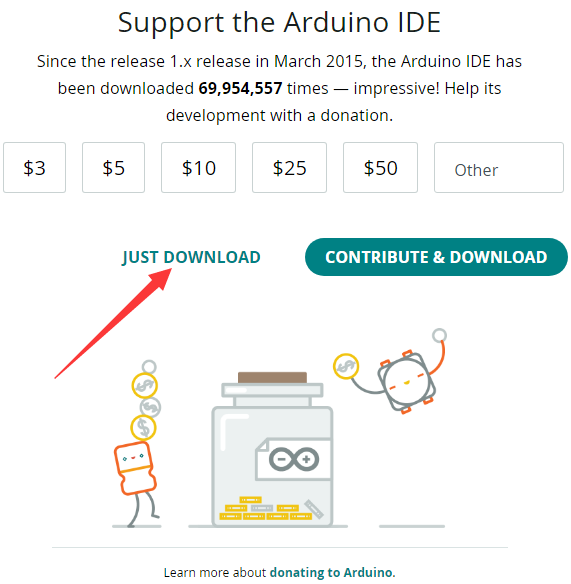
这里选择仅下载就可以了。
-
下载完成后,点击安装。

注意:安装过程中会提示你安装驱动,我们点击安装即可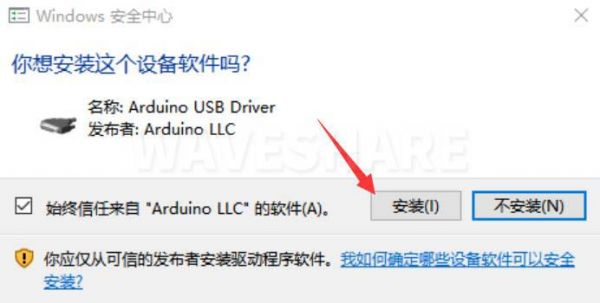




Arduino IDE中文界面
-
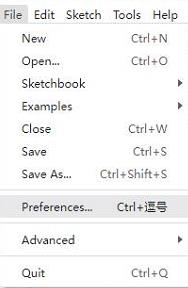
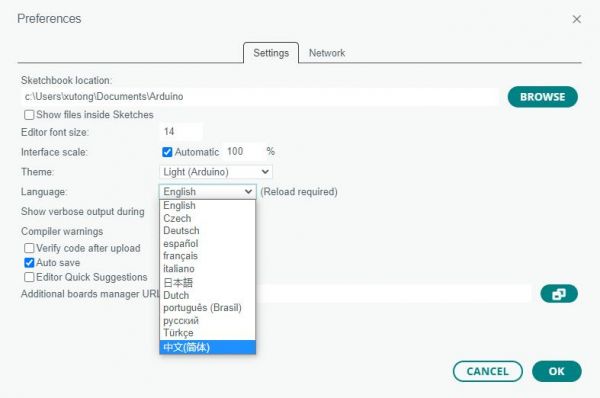
第一次安装完成后,打开 Arduino IDE 全是英文界面,我们可以在 File>Preferences 切换成简体中文。
-
在 Language 里面选择简体中文,点击 OK。


在 Arduino IDE 中安装 Arduino-Pico Core
-
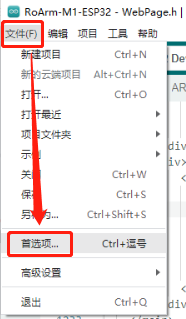
打开 Arduino IDE,点击左上角的文件,选择首选项
-
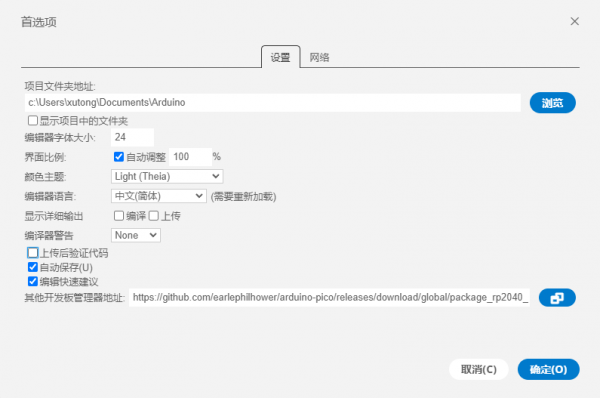
在附加开发板管理器网址中添加如下链接,然后点击 OK
该链接已包含 RP2040、RP2350 等版型,最新版型文件请访问 arduino-pico 获取https://github.com/earlephilhower/arduino-pico/releases/download/4.5.2/package_rp2040_index.json
注意:如果您已经有 ESP32 板 URL,您可以使用逗号分隔 URL,如下所示:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/4.5.2/package_rp2040_index.json
-
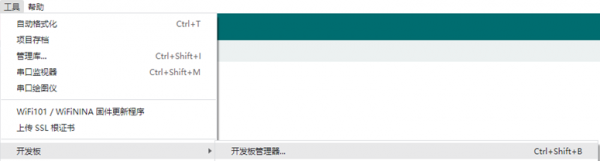
点击工具>开发板>开发板管理器>搜索 Pico,由于我的电脑已经安装过了,所以显示已安装
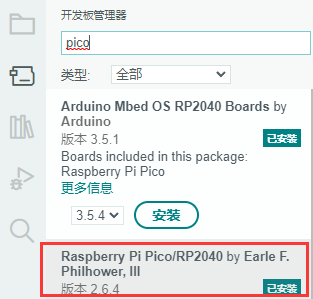




国内用户
- 因为网络原因,国内用户连接 github 并不稳定,我们另外提供了一份安装包,可以跳过在线的过程
- 安装包适用于 RP2040、RP2350
- 若已经成功配置了 Pico 环境,可以直接跳过本章
-
下载rp2040压缩包,将解压的 rp2040 文件夹复制到如下路径下
C:\Users\[username]\AppData\Local\Arduino15\packages
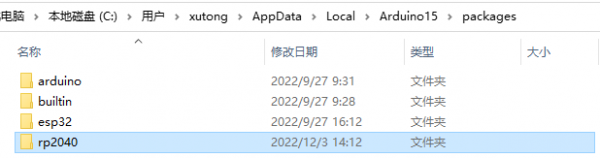
注意:将里面用户名:[username]替换成自己的用户名

第一次上传程序
-
按住 Pico 板上的 BOOT 按键,将 Pico 通过 Micro USB 线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。
- 下载程序,打开 arduino\PWM\D1-LED 路径下的 D1-LED.ino
-
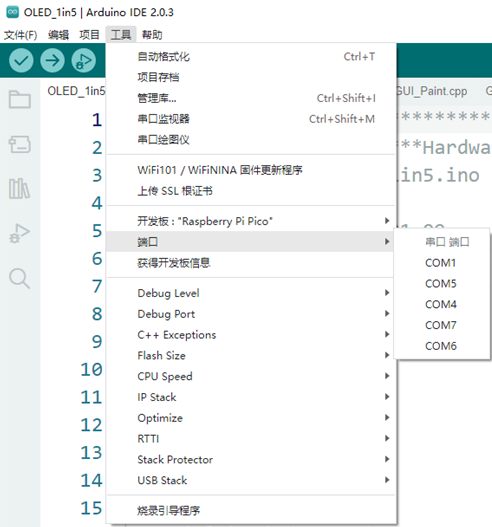
点击工具>端口,记住已有的 COM,不需要点击这个 COM(不同电脑显示的 COM 不一样,记住自己电脑上已有的 COM)
-
用 USB 线将驱动板和计算机连接起来,再点击工具>端口,第一次连接选择 uf2 Board,上传完成后,再次连接就会多出一个 COM 口

-
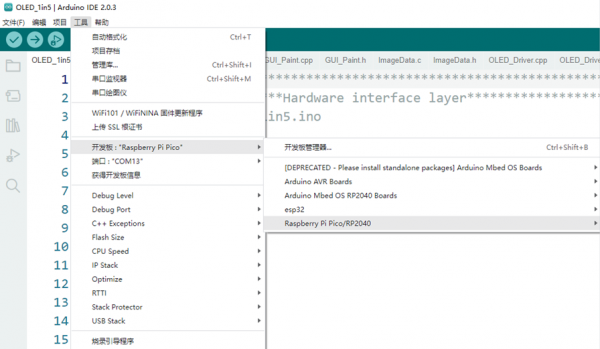
点击工具>开发板>Raspberry Pi Pico>对应版型(Raspberry Pi Pico、Raspberry Pi Pico 2等)

- 设置完成后,点击向右箭头将上传程序






- 如果期间遇到了问题,需要重新安装或者更换Arduino IDE版本时,卸载Arduino IDE需要卸载干净,卸载软件后需要手动删除C:\Users\[name]\AppData\Local\Arduino15这个文件夹内的所有内容(需要显示隐藏文件才能看到) 再重新安装
开源例程
MircoPython视频例程(github)
MicroPython固件/Blink例程(C)
树莓派官方C/C++示例程序 (github)
树莓派官方micropython示例程序 (github)
Arduino官方C/C++示例程序 (github)
示例程序
C/C++例程
01-LCD
- LCD刷一张图片并等待2.5秒
- LCD刷GUI示例
02-picoprobe
- 该例程基于开源程序picoprobe
- RP2040-GEEK运行picoprobe例程,将模拟出一个USB TO SWD 和 USB TO UART设备
- 通过UART接作为USB转串口工具,可用于与设备通讯
- 通过SWD接口作为debug工具,配合openocd可调试大部分arm芯片
- 具体使用方法可参考下文《picoprobe使用教程》
03-FATFS
- 该例程基于开源程序no-OS-FatFS-SD-SDIO-SPI-RPi-Pico
- 例程实现了一个命令行界面,类似于 busybox 或 DOS。可以实现挂载SD卡,创建、查看文件等操作。命令 help 可以查看所有可用的命令

- 例程实现了一个命令行界面,类似于 busybox 或 DOS。可以实现挂载SD卡,创建、查看文件等操作。命令 help 可以查看所有可用的命令
- 注意sd卡文件格式为FAT32

Micropython例程
01-LCD
使用方法
- 通过thonny上传将文件下的所有py和bmp文件上传到RP2040-GEEK中


例程效果
- LCD刷出GUI画面,等待几秒,刷出bmp图片
02-SD
使用方法
- 通过thonny上传将文件下的所有py文件上传到RP2040-GEEK中,并复位


例程效果
- RP2040-GEEK复位后会根据boot.py的程序,自动将SD挂载到sd文件下

- 双击打开SD文件夹,可以看到SD卡中存放的文件



CircuitPython例程
目录结构
├── examples # 示例程序 │ ├── rename_device_script.py # 设备重命名的示例 │ ├── Display_images # 此目录包含在 RP2040-GEEK 上显示图片的示例 │ │ ├── Display_Images_from_SDCard # 从SD卡读取图片并显示 │ │ └── Display_Images_FromGEEK # 从 RP2040-GEEK 读取图片并显示 │ ├── windows # 此目录包含 RP2040-GEEK 在 Windows 操作系统上的示例 │ │ ├── 01_AccessCamera.py # 打开摄像头 │ │ ├── 02_CoolFake_Hacking.py # 模拟黑客攻击 │ │ ├── 03_CreateFile.py # 创建文件 │ │ ├── 04_DeleteBrowsing_History.py # 删除浏览器历史记录 │ │ ├── 05_Mouse_control.py # 控制鼠标移动 │ │ ├── 06_openWebsite.py # 打开网页 │ │ ├── 07_PC_Restart.py # 电脑重启 │ │ ├── 08_PC_Shutdown.py # 电脑关机 │ │ ├── 09_RunNetwork_commands.py # 执行网络相关命令 │ │ └── 10_Youtube_Channel_Subscribe.py # 订阅 Youtube 频道 │ └── mac # 此目录包含 RP2040-GEEK 在 MAC 操作系统上的示例 │ ├── 01_AccessCamera.py # 打开摄像头 │ ├── 02_CoolFake_Hacking.py # 模拟黑客攻击 │ └── ......(与 windows 示例功能相同) ├── lib # 库文件,烧录固件后,上传整个 lib 目录至开发板 ├── firmware.uf2 # CircuitPython 10.0.3 版本固件 └── LICENSE
使用方法
- 烧录 firmware.uf2 固件
- 烧录固件后,上传整个 CircuitPython\lib 目录至开发板
- 上传完成后,在 Thonny IDE 选择任意程序即可直接运行
-
无需 Thonny IDE 独立运行脚本
- 在 Thonny IDE 选择要自动运行的程序,左上角,文件→另存为→CircuitPython设备→选择code.py→确认
- 若文件名不是 code.py,设备在重新上电或重新插入 USB 后将不会自动执行该脚本
- 复制完成后,将设备从 USB 端口拔出,然后重新插入电脑
- 设备重新上电后,code.py 将被 自动执行,无需启动 Thonny IDE 或进行任何额外操作
picoprobe使用教程
安装OpenOCD
Linux (and Raspberry Pi)
下载依赖库
sudo apt install automake autoconf build-essential texinfo libtool libftdi-dev libusb-1.0-0-dev
获取并编译
git clone https://github.com/raspberrypi/openocd.git cd openocd ./bootstrap ./configure make -j4 sudo make install
Windows
- 因为OpenOCD自编译在windows环境下比较复杂,推荐使用已经编译好的版本
- 解压并存放在比较短的目录中,如直接存放在C盘中
添加环境变量
- 点击“开始”菜单,搜索“环境变量”。
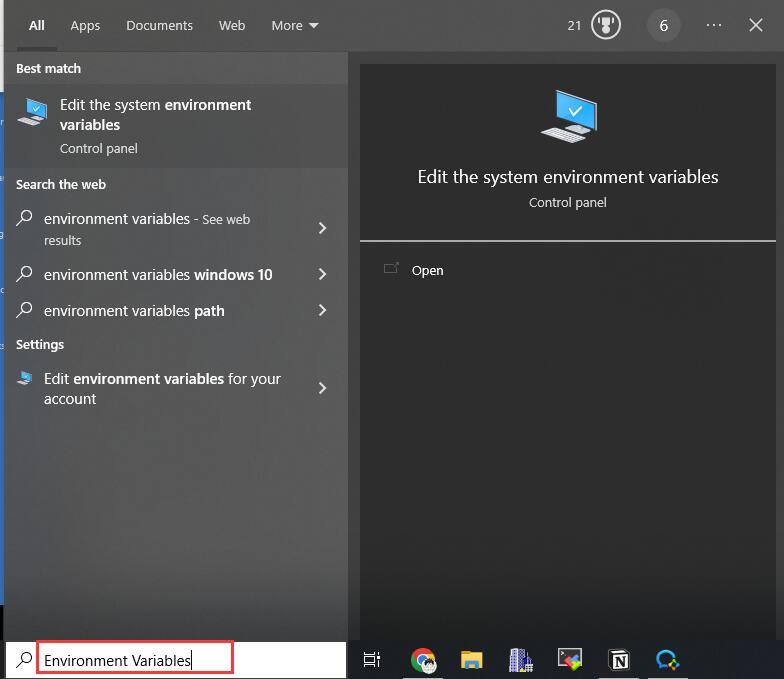
- 点击“编辑系统环境变量”

- 双击“path”变量,进入编辑界面。

- 添加新的路径
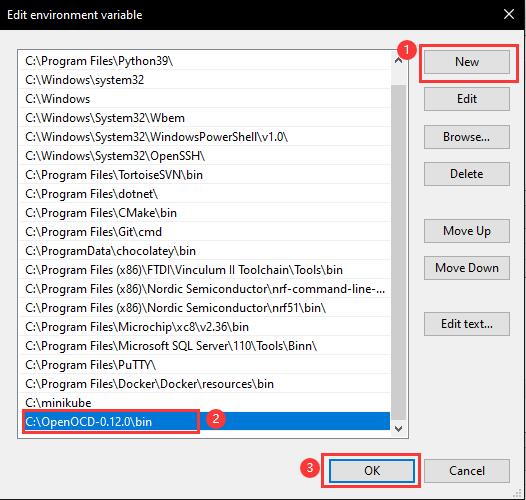
- ①创建新变量地址
- ②输入OpenOCD的存放地址
- ③点击 确定进行保存
- 点击“确定”保存更改。

- 重启电脑





安装GDB
Linux (and Raspberry Pi)
- 安装gdb-multiarch
sudo apt install gdb-multiarch
Windows
- 如果你已经正确安装了pico-sdk相关的环境,则跳过此步骤,因为GDB已经被Arm GNU Toolchain包含
- 如果你未安装pico-sdk相关的环境,建议使用官方提供pico安装程序进行安装
sudo openocd -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000" -c "program blink.elf verify reset exit"
使用Pcio Debug Probe烧录及调试
烧录程序
- Pico Debug Probe 可让您通过 SWD 端口和 OpenOCD 加载二进制文件
- 每次将新二进制文件推送到 Pico 时,您无需拔下然后按住 BOOTSEL 按钮
- 以对RP2040使用为例,烧录程序指令为
sudo openocd -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000" -c "program {你的elf文件名}.elf verify reset exit"
调试程序
打开OpenOCD服务器
- 你可以让openocd在服务器模式下使用,并连接 GDB,从而为您提供断点和“正确”调试。
- 这里也是以调试RP2040为例,Linux 输入以下指令
sudo openocd -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000"
- windows,使用powershell,输入以下指令

此时开始监听本机的3333接口则表明OpenOCD服务器已经成功开启了
- 这里也是以调试RP2040为例,Linux 输入以下指令

使用GDB命令行
- 本例程基于pico-sdk环境搭建完成,并且pico-example编译完成
- 打开powershell并进入对应的build文件夹,这里以blink例程为例

- 打开gbd,输入以下指令
- 如果为windows输入指令为
arm-none-eabi-gdb blink.elf
- 如果为linux输入指令为
gdb blink.elf

- 如果为windows输入指令为
- 依次输入以下指令
target remote localhost:3333 load continue

执行成功后,可以看到pico执行blink,led闪烁



使用VSCode调试
- 请确保前文打开OpenOCD服务器与使用GDB命令行运行正常
- 请确保Pico编译环境搭建正常
- 请确保你的VSCode安装以下插件
- Cortex-Debug
- Cmake-tools
- C/C++
- 首先打开OpenOCD服务器
- 使用VSC打开pico-examples文件夹并打开blink例程
- 使用快捷键F1并输入以下指令
open 'launch.json'
- 打开后将下文放入其中

- 若为Windows系统则输入
{ "version": "0.2.0", "configurations": [ { "name": "Pico Debug", "type":"cortex-debug", "cwd": "${workspaceRoot}", "executable": "${command:cmake.launchTargetPath}", "request": "launch", "servertype": "external", // This may need to be arm-none-eabi-gdb depending on your system "gdbPath" : "gdb", // Connect to an already running OpenOCD instance "gdbTarget": "localhost:3333", "svdFile": "${env:PICO_SDK_PATH}/src/rp2040/hardware_regs/rp2040.svd", "runToMain": true, // Work around for stopping at main on restart "postRestartCommands": [ "break main", "continue" ] } ] }- 若linux系统则输入
{ "version": "0.2.0", "configurations": [ { "name": "Pico Debug", "type":"cortex-debug", "cwd": "${workspaceRoot}", "executable": "${command:cmake.launchTargetPath}", "request": "launch", "servertype": "external", // This may need to be arm-none-eabi-gdb depending on your system "gdbPath" : "arm-none-eabi-gdb", // Connect to an already running OpenOCD instance "gdbTarget": "localhost:3333", "svdFile": "${env:PICO_SDK_PATH}/src/rp2040/hardware_regs/rp2040.svd", "runToMain": true, // Work around for stopping at main on restart "postRestartCommands": [ "break main", "continue" ] } ] }- 两者区别为调用的gdb不同
- 进入运行与调试界面 快捷键 Ctrl+Shift+D

- ①将pico debug选为 调试器
- ②将CMake选为 debug模式
- ③开始调试按键,快捷键F5
- ④选择调试对象选为blink
- 点击调试按键进入调试模式,快捷键F5

- 出现调试工具栏

- ①重启设备
- ②继续运行程序
- ③单步执行
- ④进入函数运行
- ⑤跳出函数运行
- ⑥停止调试
- 点击继续运行程序 快捷键F5,即可看到pico运行blink例程




使用Pico VSCode烧录及调试(推荐)
- 使用前请先安装Pico VSCode插件。
- 安装Pico VSCode插件后无需额外搭建环境,可按以下步骤进行烧录和调试程序。
导入工程
-
在新建或导入工程时,注意选择SWD调试

- ①选择工程目录
- ②选择SWD调试
- ③导入工程
- ①选择工程目录

烧录程序
-
烧录程序

- ①选择产品型号
- ②选择SDK版本
- ③进入Pico VSCode插件页面
- ④点击SWD烧录程序
- ①选择产品型号

调试程序
-
调试程序

- ①点击调试程序
- ②选择SDK版本
- ③进入Pico VSCode插件页面
- ④使用SWD烧录程序
- ①点击调试程序
-
调试界面

- ①重启设备
- ②继续运行程序
- ③单步执行
- ④进入函数运行
- ⑤跳出函数运行
- ⑥重新开始调试
- ⑦停止调试
- ⑧串口监视器
- ⑨变量窗口
- ⑩监视窗口
- ①重启设备
-
断点调试

- ①点击行号前可添加或删除断点
- ②调试过程中可随时添加或删除断点
- ①点击行号前可添加或删除断点



资料
配套资料
文档
程序
官方资料
树莓派官方文档
树莓派开源例程
FAQ
技术支持
联系人:黄工
QQ:2850151199
EMAIL:2850151199@qq.com
电话:0755-83040712
微信:扫下方二维码添加
