Pico-OLED-2.23
| |||||||||||||||||||||||||
| |||||||||||||||||||||||||

产品概述
提供Pico C语言和Python例程
产品参数
| 参数名称 | 参数 |
| 供电电压 | 3.3V/5V |
| 工作电流 | 40mA |
| 控制芯片 | SSD1305 |
| 通信接口 | 4-wire SPI / I2C |
| 分辨率 | 128 x 32 Pixels |
| 像素大小 | 0.41 × 0.39(mm) |
| 显示尺寸 | 55.02 × 13.1(mm) |
| 产品尺寸 | 63.00 x26.00(mm) |
接口说明

LCD 及其控制器
本款OLED使用的内置控制器为SSD1305,它有132 × 64 bit SRAM,支持最大132 × 64像素屏幕,支持SPI/I2C/8bit 8080并口,本屏幕为128 × 32 像素,所以内部SRAM没有完全使用。 本模块采用四线SPI和IIC两种接口,兼容性好,传输速度高。
I2C通信协议

- 在I2C通信时,先发送一个7bit的从设备地址+1bit的读写位,等待设备的响应。
- 在从设备应答后,接着发送一个控制字节,该字节决定了后面发送的字节是命令还是数据,然后再等待从设备应答。
- 在从设备再次应答之后,若发送命令,则只发送一字节的命令。若发送数据,可以只发送一个字节,也可以多个字节的数据连着发送,视情况而定。
SPI通信协议

- 如上图所示,SDIN 上的数据按 MSB 在前 LSB 在后为次序在每个 SCLK 的上升沿到来时被移入一个 8-bit 移位寄 存器。
- D/C#在每第 8 个时钟被采样,并且移位寄存器里的数据被写入图形显示内存(GDDRAM) 或者命令寄存器,在同样的计数时钟下。
- 在串行模式下,仅允许写操作。 在 4-wireSPI 模式下的写操作过程。
Pico使用教程
硬件连接
连接Pico的时候,请注意对应方向不要接反。可以观察模块上有USB丝印的一端与Pico的USB接口一端来判断方向(也可以根据模块上的排母的引脚标号与Pico的引脚标号判断)
您可以对照以下表格连线。
| OLED | Pico | 功能 |
| VCC | VSYS | 电源输入 |
| GND | GND | 电源地 |
| DIN | GP11 | SPI通信MOSI引脚,从设备数据输入 |
| CLK | GP10 | SPI通信SCK引脚,从设备时钟输入 |
| CS | GP9 | SPI片选引脚(低电平有效) |
| DC | GP8 | 数据/命令控制引脚(高电平数据,低电平命令) |
| RST | GP12 | 外部复位引脚(电平有效) |
| SDA | GP6 | I2C数据传输 |
| SCL | GP7 | I2C时钟输入 |
直连

扩展板连接

I2C
模块默认是使用SPI接口,如果需要使用I2C设备,需要修改背面电阻

程序下载
打开树莓派终端,执行:
方法一:从我们官网下载,推荐使用。
sudo apt-get install p7zip-full cd ~ sudo wget https://www.waveshare.net/w/upload/2/28/Pico_code.7z 7z x Pico_code.7z -o./Pico_code cd ~/Pico_code cd c/build/
例程使用
以下教程为在树莓派上操作,但由于cmake的多平台、可移植的特点,在PC上也是能成功编译,但操作略有不同,需要您自行判断。 如果是测试可以使用uf2目录下编译好的文件即可
C部分
进行编译,请确保在c目录:
cd ~/Pico_code/c/
打开main.c选择对应的模块
sudo nano main.c
如果你使用的是Pico-OLED-2.23,那么就去掉OLED_2in23_test()函数前面的//,然后按ctrl+c,然后按Y键并回车保存并退出,具体如下:

创建并进入build目录,并添加SDK:
其中 ../../pico-sdk 是你的SDK的目录。
如果存在build,则直接进入
#mkdir build cd build export PICO_SDK_PATH=../../pico-sdk #export PICO_SDK_PATH=/home/pi/pico/pico-sdk
执行cmake自动生成Makefile文件 如果build 目录下存在编译文件, 编译的环境和你的环境不一致会导致生成make文件失败,需要删除目录下的所有文件
cmake ..
执行make生成可执行文件,第一次编译时间比较久
make -j
编译完成,会在build文件夹里面生成uf2文件。 按住Pico板上的按键,将pico通过Micro USB线接到电脑的USB接口,然后松开按键。接入之后,电脑会自动识别到一个可移动盘(RPI-RP2),将uf2 文件复制到识别的可移动盘(RPI-RP2)中即可。
Python部分
1): 按住Pico板上的按键,将pico通过Micro USB线接到电脑的USB接口,然后松开按键。
接入之后,电脑会自动识别到一个可移动盘(RPI-RP2)
2): 将python目录中pico_micropython_20210121.uf2 文件复制到识别的可移动盘(RPI-RP2)中
3): 更新Thonny IDE
sudo apt upgrade thonny
4): 打开Thonny IDE (点击树莓logo -> Programming -> Thonny Python IDE )
选择Tools -> Options... -> Interpreter
选择MicroPython(Raspberry Pi Pico 和ttyACM0端口
5): 在Thonny IDE中打开python/Pico-OLED-2.23/Pico-OLED-2.23(spi).py文件
然后运行当前脚本(绿色小三角)即可
代码简析
如果您以前使用过我们的SPI屏幕应该会对这份例程比较熟悉
C
底层硬件接口
我们进行了底层的封装,由于硬件平台不一样,内部的实现是不一样的,如果需要了解内部实现可以去对应的目录中查看
在DEV_Config.c(.h)可以看到很多定义,在目录:...\c\lib\Config
- 数据类型:
#define UBYTE uint8_t #define UWORD uint16_t #define UDOUBLE uint32_t
- 模块初始化与退出的处理:
void DEV_Module_Init(void); void DEV_Module_Exit(void); 注意: 1.这里是处理使用液晶屏前与使用完之后一些GPIO的处理。
- GPIO读写:
void DEV_Digital_Write(UWORD Pin, UBYTE Value); UBYTE DEV_Digital_Read(UWORD Pin);
- SPI写数据
void DEV_SPI_WriteByte(UBYTE Value);
上层应用
对于屏幕而言,如果需要进行画图、显示中英文字符、显示图片等怎么办,这些都是上层应用做的。这有很多小伙伴有问到一些图形的处理,我们这里提供了一些基本的功能
在如下的目录中可以找到GUI,在目录:..\c\lib\GUI\GUI_Paint.c(.h)

在如下目录下是GUI依赖的字符字体,在目录:RaspberryPi\c\lib\Fonts

- 新建图像属性:新建一个图像属性,这个属性包括图像缓存的名称、宽度、高度、翻转角度、颜色
void Paint_NewImage(UWORD *image, UWORD Width, UWORD Height, UWORD Rotate, UWORD Color, UWORD Depth) 参数: image : 图像缓存的名称,实际上是一个指向图像缓存首地址的指针; Width : 图像缓存的宽度; Height: 图像缓存的高度; Rotate:图像的翻转的角度 Color :图像的初始颜色; Depth : 颜色深度
- 选择图像缓存:选择图像缓存,选择的目的是你可以创建多个图像属性,图像缓存可以存在多个,你可以选择你所创建的每一张图像
void Paint_SelectImage(UBYTE *image) 参数: image: 图像缓存的名称,实际上是一个指向图像缓存首地址的指针;
- 图像旋转:设置选择好的图像的旋转角度,最好使用在Paint_SelectImage()后,可以选择旋转0、90、180、270
void Paint_SetRotate(UWORD Rotate) 参数: Rotate: 图像选择角度,可以选择ROTATE_0、ROTATE_90、ROTATE_180、ROTATE_270分别对应0、90、180、270度
- 【说明】不同选择角度下,坐标对应起始像素点不同,这里以1.14为例,四张图,按顺序为0°, 90°, 180°, 270°。仅做为参考


- 图像镜像翻转:设置选择好的图像的镜像翻转,可以选择不镜像、关于水平镜像、关于垂直镜像、关于图像中心镜像。
void Paint_SetMirroring(UBYTE mirror) 参数: mirror: 图像的镜像方式,可以选择MIRROR_NONE、MIRROR_HORIZONTAL、MIRROR_VERTICAL、MIRROR_ORIGIN分别对应不镜像、关于水平镜像、关于垂直镜像、关于图像中心镜像
- 设置点在缓存中显示位置和颜色:这里是GUI最核心的一个函数、处理点在缓存中显示位置和颜色;
void Paint_SetPixel(UWORD Xpoint, UWORD Ypoint, UWORD Color) 参数: Xpoint: 点在图像缓存中X位置 Ypoint: 点在图像缓存中Y位置 Color : 点显示的颜色
- 图像缓存填充颜色:把图像缓存填充为某颜色,一般作为屏幕刷白的作用
void Paint_Clear(UWORD Color) 参数: Color: 填充的颜色
- 图像缓存部分窗口填充颜色:把图像缓存的某部分窗口填充为某颜色,一般作为窗口刷白的作用,常用于时间的显示,刷白上一秒
void Paint_ClearWindows(UWORD Xstart, UWORD Ystart, UWORD Xend, UWORD Yend, UWORD Color) 参数: Xstart: 窗口的X起点坐标 Ystart: 窗口的Y起点坐标 Xend: 窗口的X终点坐标 Yend: 窗口的Y终点坐标 Color: 填充的颜色
- 画点:在图像缓存中,在(Xpoint, Ypoint)上画点,可以选择颜色,点的大小,点的风格
void Paint_DrawPoint(UWORD Xpoint, UWORD Ypoint, UWORD Color, DOT_PIXEL Dot_Pixel, DOT_STYLE Dot_Style)
参数:
Xpoint: 点的X坐标
Ypoint: 点的Y坐标
Color: 填充的颜色
Dot_Pixel: 点的大小,提供默认的8种大小点
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Dot_Style: 点的风格,大小扩充方式是以点为中心扩大还是以点为左下角往右上扩大
typedef enum {
DOT_FILL_AROUND = 1,
DOT_FILL_RIGHTUP,
} DOT_STYLE;
- 画线:在图像缓存中,从 (Xstart, Ystart) 到 (Xend, Yend) 画线,可以选择颜色,线的宽度,线的风格
void Paint_DrawLine(UWORD Xstart, UWORD Ystart, UWORD Xend, UWORD Yend, UWORD Color, LINE_STYLE Line_Style , LINE_STYLE Line_Style)
参数:
Xstart: 线的X起点坐标
Ystart: 线的Y起点坐标
Xend: 线的X终点坐标
Yend: 线的Y终点坐标
Color: 填充的颜色
Line_width: 线的宽度,提供默认的8种宽度
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Line_Style: 线的风格,选择线是以直线连接还是以虚线的方式连接
typedef enum {
LINE_STYLE_SOLID = 0,
LINE_STYLE_DOTTED,
} LINE_STYLE;
- 画矩形:在图像缓存中,从 (Xstart, Ystart) 到 (Xend, Yend) 画一个矩形,可以选择颜色,线的宽度,是否填充矩形内部
void Paint_DrawRectangle(UWORD Xstart, UWORD Ystart, UWORD Xend, UWORD Yend, UWORD Color, DOT_PIXEL Line_width, DRAW_FILL Draw_Fill)
参数:
Xstart: 矩形的X起点坐标
Ystart: 矩形的Y起点坐标
Xend: 矩形的X终点坐标
Yend: 矩形的Y终点坐标
Color: 填充的颜色
Line_width: 矩形四边的宽度,提供默认的8种宽度
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Draw_Fill: 填充,是否填充矩形的内部
typedef enum {
DRAW_FILL_EMPTY = 0,
DRAW_FILL_FULL,
} DRAW_FILL;
- 画圆:在图像缓存中,以 (X_Center Y_Center) 为圆心,画一个半径为Radius的圆,可以选择颜色,线的宽度,是否填充圆内部
void Paint_DrawCircle(UWORD X_Center, UWORD Y_Center, UWORD Radius, UWORD Color, DOT_PIXEL Line_width, DRAW_FILL Draw_Fill)
参数:
X_Center: 圆心的X坐标
Y_Center: 圆心的Y坐标
Radius:圆的半径
Color: 填充的颜色
Line_width: 圆弧的宽度,提供默认的8种宽度
typedef enum {
DOT_PIXEL_1X1 = 1, // 1 x 1
DOT_PIXEL_2X2 , // 2 X 2
DOT_PIXEL_3X3 , // 3 X 3
DOT_PIXEL_4X4 , // 4 X 4
DOT_PIXEL_5X5 , // 5 X 5
DOT_PIXEL_6X6 , // 6 X 6
DOT_PIXEL_7X7 , // 7 X 7
DOT_PIXEL_8X8 , // 8 X 8
} DOT_PIXEL;
Draw_Fill: 填充,是否填充圆的内部
typedef enum {
DRAW_FILL_EMPTY = 0,
DRAW_FILL_FULL,
} DRAW_FILL;
- 写Ascii字符:在图像缓存中,在 (Xstart Ystart) 为左顶点,写一个Ascii字符,可以选择Ascii码可视字符字库、字体前景色、字体背景色
void Paint_DrawChar(UWORD Xstart, UWORD Ystart, const char Ascii_Char, sFONT* Font, UWORD Color_Foreground, UWORD Color_Background) 参数: Xstart: 字符的左顶点X坐标 Ystart: 字体的左顶点Y坐标 Ascii_Char:Ascii字符 Font: Ascii码可视字符字库,在Fonts文件夹中提供了以下字体: font8:5*8的字体 font12:7*12的字体 font16:11*16的字体 font20:14*20的字体 font24:17*24的字体 Color_Foreground: 字体颜色 Color_Background: 背景颜色
- 写英文字符串:在图像缓存中,在 (Xstart Ystart) 为左顶点,写一串英文字符,可以选择Ascii码可视字符字库、字体前景色、字体背景色
void Paint_DrawString_EN(UWORD Xstart, UWORD Ystart, const char * pString, sFONT* Font, UWORD Color_Foreground, UWORD Color_Background) 参数: Xstart: 字符的左顶点X坐标 Ystart: 字体的左顶点Y坐标 pString:字符串,字符串是一个指针 Font: Ascii码可视字符字库,在Fonts文件夹中提供了以下字体: font8:5*8的字体 font12:7*12的字体 font16:11*16的字体 font20:14*20的字体 font24:17*24的字体 Color_Foreground: 字体颜色 Color_Background: 背景颜色
- 写中文字符串:在图像缓存中,在 (Xstart Ystart) 为左顶点,写一串中文字符,可以选择GB2312编码字符字库、字体前景色、字体背景色;
void Paint_DrawString_CN(UWORD Xstart, UWORD Ystart, const char * pString, cFONT* font, UWORD Color_Foreground, UWORD Color_Background) 参数: Xstart: 字符的左顶点X坐标 Ystart: 字体的左顶点Y坐标 pString:字符串,字符串是一个指针 Font: GB2312编码字符字库,在Fonts文件夹中提供了以下字体: font12CN:ascii字符字体11*21,中文字体16*21 font24CN:ascii字符字体24*41,中文字体32*41 Color_Foreground: 字体颜色 Color_Background: 背景颜色
- 写数字:在图像缓存中,在 (Xstart Ystart) 为左顶点,写一串数字,可以选择Ascii码可视字符字库、字体前景色、字体背景色
void Paint_DrawNum(UWORD Xpoint, UWORD Ypoint, int32_t Nummber, sFONT* Font, UWORD Color_Foreground, UWORD Color_Background) 参数: Xstart: 字符的左顶点X坐标 Ystart: 字体的左顶点Y坐标 Nummber:显示的数字,这里使用的是32位长的int型保存,可以最大显示到2147483647 Font: Ascii码可视字符字库,在Fonts文件夹中提供了以下字体: font8:5*8的字体 font12:7*12的字体 font16:11*16的字体 font20:14*20的字体 font24:17*24的字体 Color_Foreground: 字体颜色 Color_Background: 背景颜色
- 写带小数的数字:在图像缓存中,在 (Xstart Ystart) 为左顶点,写一串数字可以带小数的数字,可以选择Ascii码可视字符字库、字体前景色、字体背景色
void Paint_DrawFloatNum(UWORD Xpoint, UWORD Ypoint, double Nummber, UBYTE Decimal_Point, sFONT* Font, UWORD Color_Foreground, UWORD Color_Background);
参数:
Xstart: 字符的左顶点X坐标
Ystart: 字体的左顶点Y坐标
Nummber:显示的数字,这里使用的是double型保存,足够普通需求
Decimal_Point:显示小数点后几位数字
Font: Ascii码可视字符字库,在Fonts文件夹中提供了以下字体:
font8:5*8的字体
font12:7*12的字体
font16:11*16的字体
font20:14*20的字体
font24:17*24的字体
Color_Foreground: 字体颜色
Color_Background: 背景颜色
- 显示时间:在图像缓存中,在 (Xstart Ystart) 为左顶点,显示一段时间,可以选择Ascii码可视字符字库、字体前景色、字体背景色;
void Paint_DrawTime(UWORD Xstart, UWORD Ystart, PAINT_TIME *pTime, sFONT* Font, UWORD Color_Background, UWORD Color_Foreground) 参数: Xstart: 字符的左顶点X坐标 Ystart: 字体的左顶点Y坐标 pTime:显示的时间,这里定义好了一个时间的结构体,只要把时分秒各位数传给参数; Font: Ascii码可视字符字库,在Fonts文件夹中提供了以下字体: font8:5*8的字体 font12:7*12的字体 font16:11*16的字体 font20:14*20的字体 font24:17*24的字体 Color_Foreground: 字体颜色 Color_Background: 背景颜色
资料
配套资料
文档
图纸
程序
开发软件
Pico快速上手
固件下载
| ||
|


文字教程
基础介绍
MicroPython系列
【MicroPython】machine.Pin类函数详解
【MicroPython】machine.PWM类函数详解
【MicroPython】machine.ADC类函数详解
【MicroPython】machine.UART类函数详解
【MicroPython】machine.I2C类函数详解
【MicroPython】machine.SPI类函数详解
【MicroPython】rp2.StateMachine类函数详解
C/C++系列
【C/C++】 Windows教程1——环境搭建
【C/C++】 Windows教程2——创建工程
Arduino IDE 系列
安装Arduino IDE
-
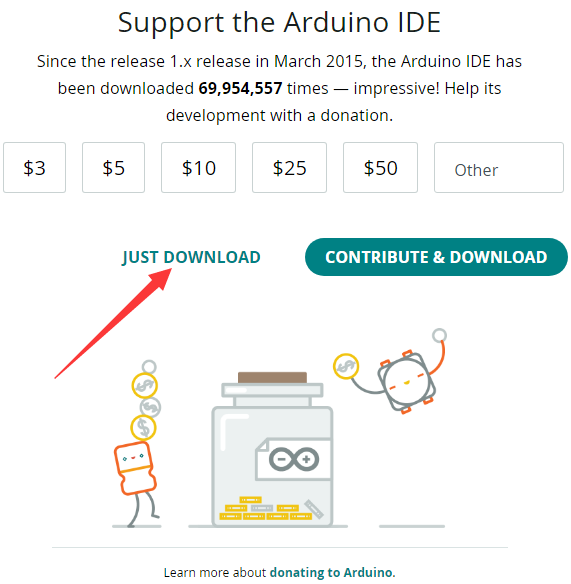
首先到Arduino官网下载Arduino IDE的安装包。

-
这里选择仅下载就可以了。
-
下载完成后,点击安装。

注意:安装过程中会提示你安装驱动,我们点击安装即可




Arduino IDE中文界面
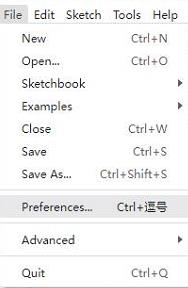
-
第一次安装完成后,打开Arduino IDE全是英文界面,我们可以在File>Preferences切换成简体中文。
-
在Language里面选择简体中文,点击OK。



在Arduino IDE中安装Arduino-Pico Core
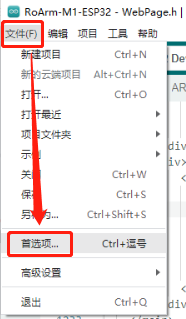
-
打开Arduino IDE,点击左上角的文件,选择首选项
-
在附加开发板管理器网址中添加如下链接,然后点击OK
https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json

注意:如果您已经有ESP32板URL,您可以使用逗号分隔 URL,如下所示:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
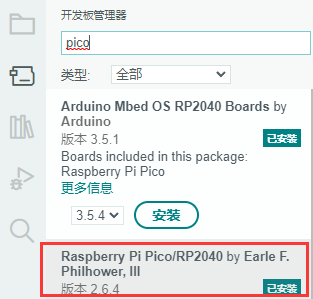
-
点击工具>开发板>开发板管理器>搜索pico,由于我的电脑已经安装过了,所以显示已安装





国内用户
- 因为网络原因,国内用户连接github并不稳定,我们另外提供了一份安装包,可以跳过在线的过程
- 若已经成功配置了pico环境,可以直接跳过本章
-
下载rp2040压缩包,将解压的rp2040文件夹复制到如下路径下
C:\Users\[username]\AppData\Local\Arduino15\packages

注意:将里面用户名:[username]替换成自己的用户名

第一次上传程序
-
按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。

- 下载程序,打开arduino\PWM\D1-LED路径下的D1-LED.ino
-
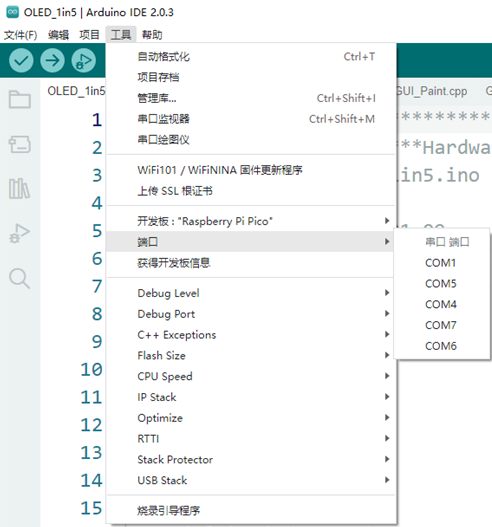
点击工具>端口,记住已有的COM,不需要点击这个COM(不同电脑显示的COM不一样,记住自己电脑上已有的COM)
-
用USB线将驱动板和计算机连接起来,再点击工具>端口,第一次连接选择uf2 Board,上传完成后,再次连接就会多出一个COM口

-
点击工具>开发板>Raspberry Pi Pico/RP2040>Raspberry Pi Pico


- 设置完成后,点击向右箭头上传将程序





- 如果期间遇到了问题,需要重新安装或者更换Arduino IDE版本时,卸载Arduino IDE需要卸载干净,卸载软件后需要手动删除C:\Users\[name]\AppData\Local\Arduino15这个文件夹内的所有内容(需要显示隐藏文件才能看到) 再重新安装
开源例程
MircoPython视频例程(github)
MicroPython固件/Blink例程(C)
树莓派官方C/C++示例程序 (github)
树莓派官方micropython示例程序 (github)
Arduino官方C/C++示例程序 (github)
FAQ
技术支持
联系人:彭工
EMAIL:2851966006@qq.com
电话:0755-83040712
QQ:2851966006
微信:扫下方二维码添加
