Pico-Servo-Driver
| ||||||||||||||||||||
| ||||||||||||||||||||

说明
产品简介
专为Raspberry Pi Pico 设计的一款舵机控制拓展板,板载16通道舵机控制接口。
产品特性
- 板载 Raspberry Pi Pico 接口,适用于 Raspberry Pi Pico 系列主板
- 支持高达 16 路舵机或 PWM 输出,每路支持高达 16 位分辨率
- 板载 5V 稳压芯片,输出电流可达 3A,可通过 VIN 端子接入电池供电
- 板载标准舵机接口,可接入 SG90、MG90S、MG996R 等常用舵机
- 引出 Pico 未占用的引脚,方便扩展
- 提供完善的配套资料手册 (Raspberry Pi Pico C/C++ 和 MicroPython 等示例程序)
产品参数
- 工作电压 5V(Pico) 或 6~12V(VIN 端子)
- 舵机电压 5V
- 逻辑电压 3.3V
- 控制接口 GPIO
- 过孔直径 3.0mm
- 产品尺寸 65 × 56mm
引脚分布

产品尺寸

使用
硬件连接
连接Pico的时候,请注意对应方向不要接反。可以观察模块上有USB丝印的一端与Pico的USB接口一端来判断方向(也可以根据模块上的排母的引脚标号与Pico的引脚标号判断)

程序下载
一:树莓派上直接下载
打开树莓派终端,执行:
sudo apt-get install p7zip-full cd ~ sudo wget https://www.waveshare.net/w/upload/3/31/Pico_Servo_Driver_Code.7z 7z Pico_Servo_Driver_Code.7z -o./Pico_Servo_Driver_Code.7z cd ~/Pico_Servo_Driver_Code
二:在资料栏下点击示例程序直接下载即可
树莓派环境使用
c
- 以下教程为在树莓派上操作,但由于cmake的多平台、可移植的特点,在PC上也是能成功编译,但操作略有不同,需用户自行判断。
进行编译,请确保在c目录:
cd ~/Pico_Servo_Driver_Code/c/
在文件夹中创建并进入build目录,并添加SDK: 其中 ../../pico-sdk 是你的SDK的目录。 我们示例程序中是有build的,直接进入即可
cd build export PICO_SDK_PATH=../../pico-sdk (注意:务必写对你自己的SDK所在路径)
执行cmake自动生成Makefile文件
cmake ..
执行make生成可执行文件,第一次编译时间比较久
make -j9
编译完成,会生成uf2文件。 按住Pico板上的按键,将pico通过Micro USB线接到树莓派的USB接口,然后松开按键。接入之后,树莓派会自动识别到一个可移动盘(RPI-RP2),将build文件夹下的main.uf2 文件复制到识别的可移动盘(RPI-RP2)中即可。
cp main.uf2 /media/pi/RPI-RP2/
python
树莓派环境下的使用
- 1.刷好Micropython的固件,将pico_micropython_xxxxx.uf2 文件拷入pico中(下面Windows教程中有详细介绍)。
- 2.在树莓派上打开Thonny IDE (点击树莓派logo -> Programming -> Thonny Python IDE ),你可以在Help->About Thonny查看版本信息
以确保你的版本是有Pico支持包的,同样你可以点击Tools -> Options... -> Interpreter选择MicroPython(Raspberry Pi Pico 和ttyACM0端口
如图所示:

如果你当前的Thonny版本没有pico支持包,输入以下指令来更新Thonny IDE
sudo apt upgrade thonny
3.点击File->Open...->python/Pico_Servo_Driver_Code/python/servo.py,运行脚本即可
实验现象通道一接上舵机,将会从0度旋转到180度,循环三次
Windows环境使用
c
下载例程
使用例程
注意:下面的图片仅供参考,步骤是一样的。
1. 打开对应C程序文件夹

2. 通过Vs coed打开,并选择对应编译工具

3. 点击编译按键进行编译

4.Pico-Eval-Board上的Reset按键按下可复位Pico,先按下BOOTSEL按键再按下RUN按键后释放Reset按键,Pico可进入磁盘模式无需插拔Pico,并将build文件下的UF2文件拖拽到RPI-RP2盘符中

5.此时Pico开始运行对应程序
代码简析
底层硬件接口
我们进行了底层的封装,由于硬件平台不一样,内部的实现是不一样的,如果需要了解内部实现可以去对应的目录中查看
在DEV_Config.c(.h)可以看到很多定义,在目录:...\c\lib\Config
- 数据类型:
#define UBYTE uint8_t #define UWORD uint16_t #define UDOUBLE uint32_t
- 模块初始化与退出的处理:
void DEV_Module_Init(void); void DEV_Module_Exit(void);
- PWM初始化处理:
void PWM_initialization();
- 中断处理函数:
void on_pwm_wrap();
- 定义使用的通道
#define CHANNE_N 0xFFFF // 0x0001表示0通道开启,0x0000表示通道全部关闭
- 旋转的角度
#define ROTATE_0 1700 //旋转到0°的位置 #define ROTATE_45 3300 //旋转到45°的位置 #define ROTATE_90 4940 //旋转到90°的位置 #define ROTATE_135 6600 //旋转到135°的位置 #define ROTATE_180 8250 //旋转到180°的位置
python
windows环境下的使用
- 1.按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。
- 2.下载pico_micropython_xxxxx.uf2 文件,复制到识别的可移动盘(RPI-RP2)中
- 3.打开Thonny IDE(注意:要使用最新版本的Thonny,否则是没有Pico的支持包的,当前Windows下的最新版本为v3.3.3)
- 4.点击工具->设置->解释器,如图所示选择Pico及对应的端口

- 5.文件->打开->servo.py,点击运行即可,如图所示说明程序已经运行:

实验现象与c程序完全相同,这里不再重复
Pico快速上手
固件下载
| ||
|


基础介绍
MicroPython系列
安装Thonny IDE
为了方便在电脑上使用 MicroPython 开发 Pico/Pico2 板,建议下载 Thonny IDE
- 下载 Thonny IDE 并按照步骤安装,安装包均为 Windows 版本,其他版本请参考 Thonny 官网
- 安装完成之后,第一次要配置语言和主板环境,由于我们是为了使用 Pico/Pico2,所以注意主板环境选择 Raspberry Pi 选项

- 配置 Micrpython 环境及选择 Pico/Pico2 端口
- 先将 Pico/Pico2 接入电脑,左键点击 Thonny 右下角的配置环境选项--》选择 configture interpreter
- 在弹出的窗口栏中选择 MicroPython(Raspberry Pi Pico),同时选择对应的端口


烧录固件
- 点击 ok 后返回到 Thonny 主界面,下载对应的固件库并烧录到设备中,然后点击停止按钮,在 Shell 窗口中即可显示当前使用到的环境
- 注意:Pico 系列版型可直接使用 Micropython 官方提供的固件,RP 系列版型请使用下方或程序包中的固件
- 最新版本固件编译步骤
- Pico/Pico2 在 Windows 下载固件库方法: 按住 BOOT 键后连接电脑后,松开 BOOT 键,电脑会出现一个可移动磁盘,将固件库复制进去即可
- RP2040/RP2350 在 Windows 下载固件库方法: 连接电脑后,同时按下 BOOT 键跟 RESET 键,先松开 RESET 键再松开 BOOT 键,电脑会出现一个可移动磁盘,将固件库复制进去即可(用 Pico/Pico2 的方式也可以)

讲解视频
【MicroPython】machine.Pin类函数详解
【MicroPython】machine.PWM类函数详解
【MicroPython】machine.ADC类函数详解
【MicroPython】machine.UART类函数详解
【MicroPython】machine.I2C类函数详解
【MicroPython】machine.SPI类函数详解
【MicroPython】rp2.StateMachine类函数详解
C/C++系列
对于 C/C++,建议使用 Pico VSCode 进行开发,这是一款 Microsoft Visual Studio Code 扩展,旨在让您在为 Raspberry Pi Pico 系列开发板创建、开发和调试项目时更加轻松。无论您是初学者还是经验丰富的专业人士,此工具都可以帮助您自信而轻松地进行 Pico 开发。下面我们介绍如何安装该扩展并使用。
- 官网教程:https://www.raspberrypi.com/news/pico-vscode-extension/
- 本教程适用于树莓派Pico、Pico2与本公司开发的RP2040、RP2350系列开发板
- 开发环境默认以 Windows11 为例,其他环境请参考官网教程进行安装
安装VSCode
-
首先,点击下载 pico-vscode 程序包,解压并打开程序包,双击安装 VSCode

注意:如果已安装 vscode 注意检查版本是否为 v1.87.0 或更高版本




安装扩展
-
点击扩展,选择从 VSIX 安装

-
选择 vsix 后缀的软件包,点击安装

-
随后 vscode 会自动安装 raspberry-pi-pico 及其依赖扩展,可以点击刷新查看安装进度

-
右下角显示完成安装,关闭 vscode





配置扩展
-
打开目录 C:\Users\用户名,将整个 .pico-sdk 拷贝至该目录

-
拷贝完成

-
打开 vscode,对 Raspberry Pi Pico 扩展中各个路径进行配置

配置如下:Cmake Path: ${HOME}/.pico-sdk/cmake/v3.28.6/bin/cmake.exe Git Path: ${HOME}/.pico-sdk/git/cmd/git.exe Ninja Path: ${HOME}/.pico-sdk/ninja/v1.12.1/ninja.exe Python3 Path: ${HOME}/.pico-sdk/python/3.12.1/python.exe



新建工程
-
配置完成,测试新建工程,输入工程名、选择路径后点击 Creat 创建工程
测试官方示例,可以点击工程名旁的 Example 进行选择
-
创建工程成功



编译工程
-
选择SDK版本

-
选择 Yes 进行高级配置

-
选择交叉编译链,13.2.Rel1 适用 ARM 核,RISCV.13.3 适用 RISCV 核,这里根据您的需求任意选择其中一个即可

-
CMake 版本选择 Default(前面配置的路径)

-
Ninja 版本选择 Default

-
选择开发板

-
点击 Complie 进行编译

-
成功编译出 uf2 格式文件即可









烧录固件
这里提供两种方法烧录固件
-
使用pico-vscode插件烧录固件
将开发板连接到电脑上,点击Run直接烧录固件
-
手动烧录固件
1.按住Boot按键 2.将开发板连接到电脑上 3.然后会电脑会将开发板识别成一个U盘设备 4.将.uf2文件复制到U盘中,设备就会自动重启,程序烧录成功

导入工程
-
选择工程目录,导入工程

- 导入工程的 Cmake 文件不能有中文(包括注释),否则可能导致导入失败
-
导入自己的工程需要在 Cmake 文件中加一行代码,才能正常切换 pico 和 pico2,否则即使选择 pico2,编译得到的固件仍是适用于 pico 的

set(PICO_BOARD pico CACHE STRING "Board type")


更新扩展
-
离线包中的扩展版本为0.15.2,安装完成后,更新至最新版本


Arduino IDE 系列
安装Arduino IDE
-
首先到Arduino官网下载 Arduino IDE 的安装包。
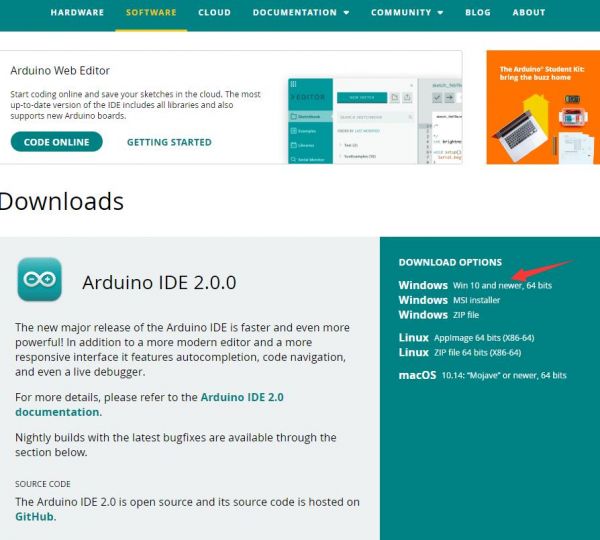
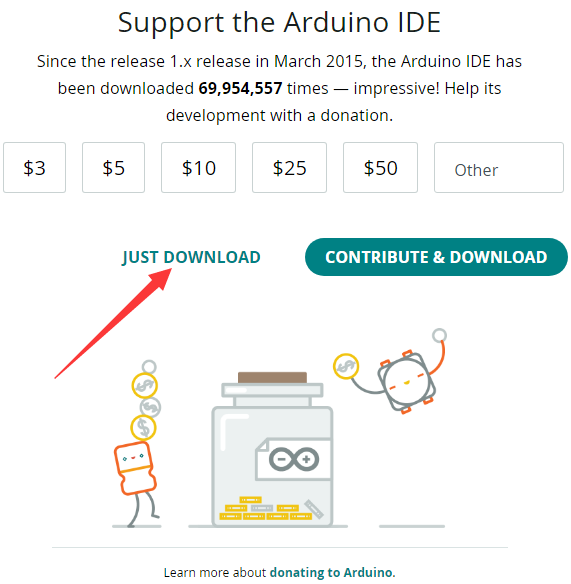
-
这里选择仅下载就可以了。
-
下载完成后,点击安装。

注意:安装过程中会提示你安装驱动,我们点击安装即可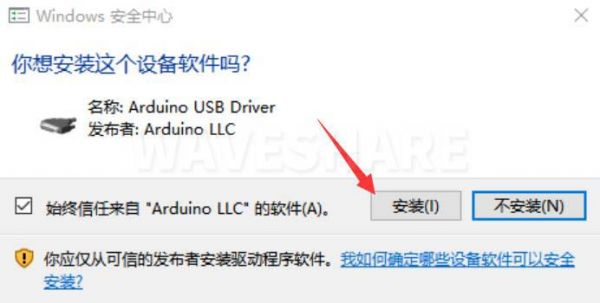




Arduino IDE中文界面
-
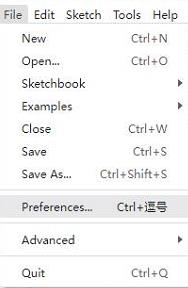
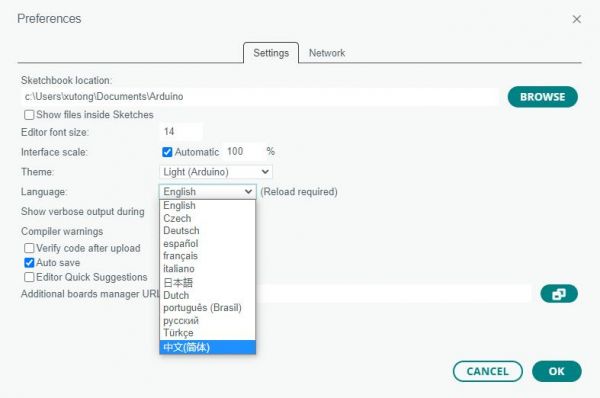
第一次安装完成后,打开 Arduino IDE 全是英文界面,我们可以在 File>Preferences 切换成简体中文。
-
在 Language 里面选择简体中文,点击 OK。


在 Arduino IDE 中安装 Arduino-Pico Core
-
打开 Arduino IDE,点击左上角的文件,选择首选项
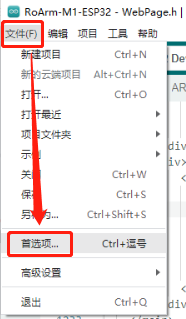
-
在附加开发板管理器网址中添加如下链接,然后点击 OK
该链接已包含 RP2040、RP2350 等版型,最新版型文件请访问 arduino-pico 获取https://github.com/earlephilhower/arduino-pico/releases/download/4.5.2/package_rp2040_index.json
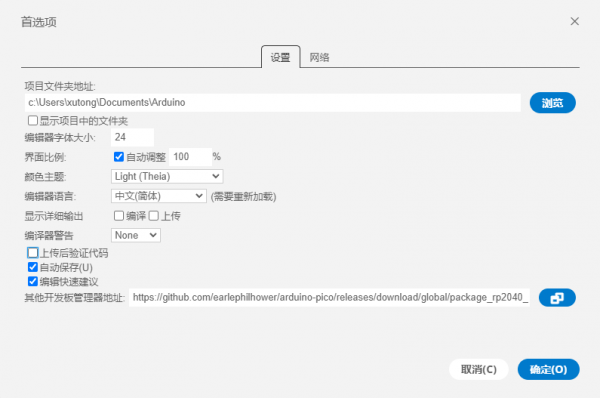
注意:如果您已经有 ESP32 板 URL,您可以使用逗号分隔 URL,如下所示:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/4.5.2/package_rp2040_index.json
-
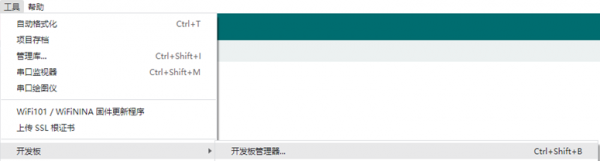
点击工具>开发板>开发板管理器>搜索 Pico,由于我的电脑已经安装过了,所以显示已安装
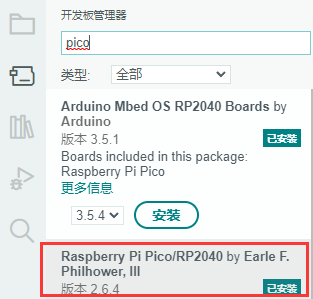




国内用户
- 因为网络原因,国内用户连接 github 并不稳定,我们另外提供了一份安装包,可以跳过在线的过程
- 安装包适用于 RP2040、RP2350
- 若已经成功配置了 Pico 环境,可以直接跳过本章
-
下载rp2040压缩包,将解压的 rp2040 文件夹复制到如下路径下
C:\Users\[username]\AppData\Local\Arduino15\packages
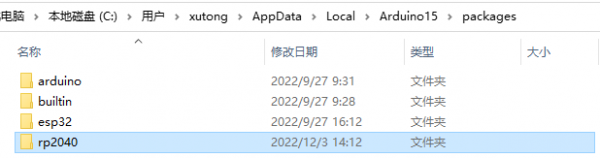
注意:将里面用户名:[username]替换成自己的用户名

第一次上传程序
-
按住 Pico 板上的 BOOT 按键,将 Pico 通过 Micro USB 线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。
- 下载程序,打开 arduino\PWM\D1-LED 路径下的 D1-LED.ino
-
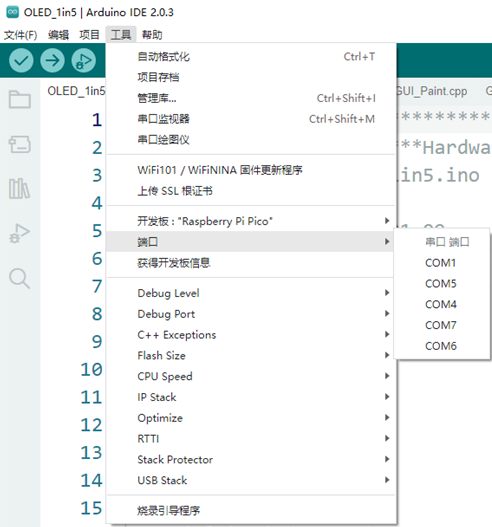
点击工具>端口,记住已有的 COM,不需要点击这个 COM(不同电脑显示的 COM 不一样,记住自己电脑上已有的 COM)
-
用 USB 线将驱动板和计算机连接起来,再点击工具>端口,第一次连接选择 uf2 Board,上传完成后,再次连接就会多出一个 COM 口

-
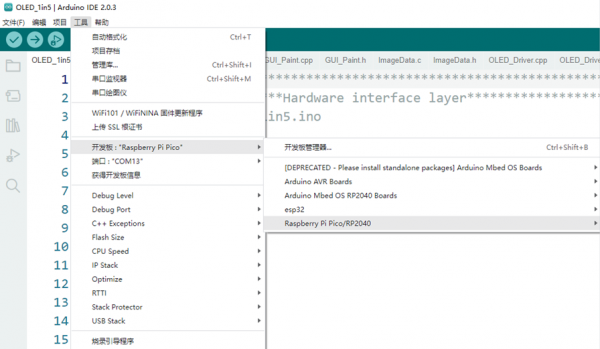
点击工具>开发板>Raspberry Pi Pico>对应版型(Raspberry Pi Pico、Raspberry Pi Pico 2等)

- 设置完成后,点击向右箭头将上传程序






- 如果期间遇到了问题,需要重新安装或者更换Arduino IDE版本时,卸载Arduino IDE需要卸载干净,卸载软件后需要手动删除C:\Users\[name]\AppData\Local\Arduino15这个文件夹内的所有内容(需要显示隐藏文件才能看到) 再重新安装
开源例程
MircoPython视频例程(github)
MicroPython固件/Blink例程(C)
树莓派官方C/C++示例程序 (github)
树莓派官方micropython示例程序 (github)
Arduino官方C/C++示例程序 (github)
FAQ
技术支持
联系人:彭工
EMAIL:2851966006@qq.com
电话:0755-83040712
QQ:2851966006
微信:扫下方二维码添加
