Pico-SIM7080G-Cat-M/NB-IoT
| ||||||||||||||||||||
| ||||||||||||||||||||

说明
产品介绍
产品概述
本产品是一款具有 NB-IoT (窄带物联网)、Cat-M (也叫 eMTC,增强机器类通信) 和 GNSS (全球导航卫星系统) 功能的树莓派 Pico 扩展板,国内 NB-IoT 全网通,串口 AT 指令控制,支持 HTTP/MQTT/LWM2M/COAP 等协议通信。具有低延迟、低功耗、广覆盖和低成本等优点,非常适用于如智能仪表、资产跟踪和远程监控等物联网应用。
产品特性
- 板载 Raspberry Pi Pico 接口,适用于 Raspberry Pi Pico 系列主板
- UART 接口通信,串口 AT 指令控制
- 支持 TCP/UDP/HTTP/HTTPS/TLS/DTLS/PING/LWM2M/COAP/MQTT 等通信协议
- 支持 GNSS 定位 (GPS、GLONASS、北斗 和 Galileo)
- 板载 3.7V 锂电池接口及充电电路,可外接可充电锂电池实现外部供电,支持边充边放
- 板载 2 个 LED 指示灯,方便查看模块运行状态
- 板载 nano SIM 卡槽,国内支持电信/联通/移动的 NB-IoT 专用卡
- 提供完善的配套资料手册 (MicroPython 示例程序和使用手册等)
产品参数
|
产品型号 |
SIM7080G |
SIM7020C / SIM7020E |
|---|---|---|
|
工作频段 | ||
|
NB-IoT |
B1/B2/B3/B4/B5/B8/B12/B13/B18/B19/ |
SIM7020C: |
|
Cat-M |
B1/B2/B3/B4/B5/B8/B12/B13/B14/B18/ |
不支持 |
|
GNSS |
GPS, GLONASS, BeiDou, Galileo |
不支持 |
|
适用地区 |
全球通用 |
SIM7020C:中国 |
|
数据传输 | ||
|
NB-IoT(Kbps) |
136(DL)/150(UL) |
26.15(DL)/62.5(UL) |
|
Cat-M(Kbps) |
589(DL)/1119(UL) |
- |
|
其他参数 | ||
|
通信协议 |
TCP/UDP/HTTP/HTTPS/TLS/DTLS/PING/LWM2M/COAP/MQTT 等 | |
|
供电方式 |
通过锂电池接口或 Raspberry Pi Pico 的 USB 口 | |
|
锂电池接口 |
3.7V ~ 4.2V | |
|
逻辑电平 |
3.3V | |
|
单模组耗流 |
空闲模式:10mA |
空闲模式:5.6mA |
|
休眠模式:1.2mA |
休眠模式:0.4mA | |
|
PSM 模式:3.2uA |
PSM 模式:3.4uA | |
|
指示灯 |
NET:网络指示灯 | |
|
开关 |
锂电池供电开关 | |
|
SIM 卡 |
NB-IoT / Cat-M卡 (仅支持 1.8V) |
NB卡(1.8V / 3V) |
|
天线接口 |
LTE、GNSS |
LTE |
|
产品尺寸 |
73.5 × 24.00mm | |
接口定义

产品尺寸

示例演示
Python例程
windows环境下的使用
- 1.按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。
- 2.将python目录中pico_micropython_xxxxxxxx.uf2 文件复制到识别的可移动盘(RPI-RP2)中
- 3.打开Thonny IDE(注意:要使用最新版本的Thonny,否则是没有Pico的支持包的,当前Windows下的最新版本为v3.3.3)
- 4.点击工具->设置->解释器,如图所示选择Pico及对应的端口

- 5.文件->打开->main.py,点击运行即可,如下图所示:

本例程提供了一个简单的程序...
树莓派环境下的使用
- 1.刷固件的过程与Windows上一样,你可以选择在PC或者树莓派上将pico_micropython_xxxxxxxx.uf2 文件拷入pico中。
- 2.在树莓派山打开Thonny IDE (点击树莓logo -> Programming -> Thonny Python IDE ),你可以在Help->About Thonny查看版本信息
以确保你的版本是有Pico支持包的,同样你可以点击Tools -> Options... -> Interpreter选择MicroPython(Raspberry Pi Pico 和ttyACM0端口
如图所示:

如果你当前的Thonny版本没有pico支持包,输入以下指令来更新Thonny IDE
sudo apt upgrade thonny
3.点击File->Open...->python/main.py,运行脚本即可
AT Test
实例说明
该例程主要是方便用户可以通过Thony软件,直接测试验证模组的AT指令收发。主程序首先会直接给模组开机,然后检测网络情况,之后会循环检测用户输入的AT指令,帮通过串口发送给模组,然后把模组的AT指令返回回传到Pico的串口打印出来。
详细的AT指令集请见:SIM7080_Series_AT_Command_Manual_V1.02.pdf
运行现象

HTTP
在本实例中,Raspberry Pico通过NB-IoT连接上互联网,通过HTTP GET获取到 获取到天气网站的天气信息,同时把 Pico 上的温度信息 通过HTTP POST 推送到服务器上。
用户可以通过网页访问,查看实时上传的数据。大致的软件示意图如下所示:

硬件准备
按下图所示,把Pico-SIM7080G-Cat-M/NB-IoT模块焊接上排座或排针,然后接入Pico主板、电池、天线和NB-IoT卡:

服务器网页部署
以 http://pico.wiki/esp-chart.php 为例。其软件框图大致如下图所示:

1、服务器搭建php,mysql等环境,创建数据库文件,比如:
- 数据库:example_esp_data
- 密码:your_password
- 用户名:your_username
- 创建数据库表:
CREATE TABLE Sensor ( id INT(6) UNSIGNED AUTO_INCREMENT PRIMARY KEY, value1 VARCHAR(10), value2 VARCHAR(10), value3 VARCHAR(10), reading_time TIMESTAMP DEFAULT CURRENT_TIMESTAMP ON UPDATE CURRENT_TIMESTAMP)
2、服务器端的php示例文件,有post-data.php 和 esp-chart.php
- post-data.php:HTTP POST的API接口,SIM7080G模块可以通过调用此API接口,往服务器POST数据。
- esp-chart.php:用户端访问的网页,可通过此页面获取到SIM7080G上传的最新数据,并通过图表展示出来。
Pico端软件设置
1、参考教程:Template:Raspberry Pi Pico Quick Start 选择在 Windows 或 树莓派 系统下运行MicroPython开发环境
(推荐选用Windows 开发环境,下文以Windows开发环境为例)。
2、下载Python例程:HTTP.py ,代码部分预览如下:
- HTTP GET部分:
# HTTP GET TEST
def http_get():
send_at('AT+SHDISC', 'OK')
send_at('AT+SHCONF="URL",\"'+http_get_server[0]+'\"', 'OK')
set_http_length()
send_at('AT+SHCONN', 'OK', 3000)
if send_at('AT+SHSTATE?', '1'):
set_http_content()
resp = str(send_at_wait_resp('AT+SHREQ=\"'+http_get_server[1]+'\",1', 'OK',8000))
# print("resp is :", resp)
try:
get_pack_len = int(resp[resp.rfind(',')+1:-5])
if get_pack_len > 0:
send_at_wait_resp('AT+SHREAD=0,'+str(get_pack_len), 'OK', 5000)
send_at('AT+SHDISC', 'OK')
else:
print("HTTP Get failed!\n")
except ValueError:
print("ValueError!\n")
else:
print("HTTP connection disconnected, please check and try again\n")
- HTTP POST部分:
- HTTP POST TEST
def http_post():
send_at('AT+SHDISC', 'OK')
send_at('AT+SHCONF="URL",\"' + http_post_server[0] + '\"', 'OK')
set_http_length()
send_at('AT+SHCONN', 'OK', 3000)
if send_at('AT+SHSTATE?', '1'):
set_http_content()
send_at('AT+SHCPARA', 'OK')
if send_at('AT+SHBOD=62,10000', '>', 1000) :
send_at(http_post_tmp, 'OK')
resp = str(send_at_wait_resp('AT+SHREQ=\"/'+http_post_server[1]+'\",3','OK', 8000))
# print("resp is :", resp)
try:
get_pack = int(resp[resp.rfind(',')+1:-5])
print(get_pack)
if get_pack > 0:
send_at_wait_resp('AT+SHREAD=0,' + str(get_pack), 'OK', 3000)
send_at('AT+SHDISC', 'OK')
else:
print("HTTP Post failed!\n")
except ValueError:
print("ValueError!\n")
else:
print("Send failed\n")
else:
print("HTTP connection disconnected, please check and try again\n")
更多关于SIM7080G模组HTTP应用文档内容,请见:SIM7070/SIM7080_Series_HTTP_Application_Note_V1.02.pdf
3、把连接好 Pico-SIM7080G-Cat-M/NB-IoT 模块的Pico主板,通过USB连接到电脑上。
- 运行Thonny软件,选择MicroPython(Raspberry Pi Pico),打开示例程序的路径。
- 先点击Stop(序号1),最后点击Run(序号2)按钮,开始运行程序,可通过Shell窗口(序号3)查看运行结果,如下图所示:


4、你可以通过Thonny软件查看、修改、或者运行调试代码。
- 如果代码最终敲定,想要脱机自动运行的话,可以选择 File -> Save as -> Raspberry Pi Pico,另存为 main.py。


运行现象
运行HTTP.py,则Pico可以开始通过HTTP GET 天气网站的天气信息,同时可以将Pico主板上的温度通过HTTP POST到pico.wiki上。
此时,我们通过网页访问http://pico.wiki/esp-chart.php,网页可以以图表的形式直接展示出实时上传的数据。如下图所示:
GET:

POST:
网页端访问:
MQTT
软件下载
- MQTT软件下载点击下载1.7.1版本
- 软件配置:

设置信息

创建订阅号


运行现象
- 运行MQTT.py,则Pico控制Pico-SIM7080G-Cat-M/NB-IoT进行初始化配置,然后订阅MQTT后发送"on"

GPS
实例说明
本示例主要演示GPS定位相关测试。进行该实例前,必须把GPS天线的接收头放到室外(或窗口,可以看到天空的地方),另外阴雨天气无法获取到GPS定位。
运行现象

C
环境搭建
【C/C++】 Windows教程1——环境搭建
【C/C++】 Windows教程2——创建工程
例程使用
1. 打开对应C程序文件夹

2. 通过Vs coed打开,选择对应编译工具跟需要运行的例程(将不用的注释掉,用的解除注释,单次只能运行一个)


3. 点击编译按键进行编译

4.按住Pico的BOOT按键后上电,可使Pico进入磁盘模式,并将build文件下的UF2文件拖拽到RPI-RP2盘符中

5.此时Pico开始运行对应程序,可以通过串口助手查看运行状态
资料
配套资料
产品文档
示例程序
相关软件
数据手册
- File:SIM7080 Series_AT Command Manual_V1.02.pdf
- File:SIM7080G Hardware Design_V1.03.pdf
- File:SIM7070_SIM7080_SIM7090 Series_MQTT(S)_Application Note_V1.02.pdf
- File:SIM7070_SIM7080_SIM7090 Series_HTTP(S)_Application Note_V1.02.pdf
- File:SIM7070_SIM7080_SIM7090 Series_TCPUDP(S)_Application Note_V1.03.pdf
- File:SIM7070_SIM7080_SIM7090 Series_Email_Application Note_V1.02.pdf
说明:最新版文档或更多模组的文档资料请前往 SIMCOM 官方下载
Pico快速上手
固件下载
| ||
|


基础介绍
MicroPython系列
安装Thonny IDE
为了方便在电脑上使用 MicroPython 开发 Pico/Pico2 板,建议下载 Thonny IDE
- 下载 Thonny IDE 并按照步骤安装,安装包均为 Windows 版本,其他版本请参考 Thonny 官网
- 安装完成之后,第一次要配置语言和主板环境,由于我们是为了使用 Pico/Pico2,所以注意主板环境选择 Raspberry Pi 选项

- 配置 Micrpython 环境及选择 Pico/Pico2 端口
- 先将 Pico/Pico2 接入电脑,左键点击 Thonny 右下角的配置环境选项--》选择 configture interpreter
- 在弹出的窗口栏中选择 MicroPython(Raspberry Pi Pico),同时选择对应的端口


烧录固件
- 点击 ok 后返回到 Thonny 主界面,下载对应的固件库并烧录到设备中,然后点击停止按钮,在 Shell 窗口中即可显示当前使用到的环境
- 注意:Pico 系列版型可直接使用 Micropython 官方提供的固件,RP 系列版型请使用下方或程序包中的固件
- 最新版本固件编译步骤
- Pico/Pico2 在 Windows 下载固件库方法: 按住 BOOT 键后连接电脑后,松开 BOOT 键,电脑会出现一个可移动磁盘,将固件库复制进去即可
- RP2040/RP2350 在 Windows 下载固件库方法: 连接电脑后,同时按下 BOOT 键跟 RESET 键,先松开 RESET 键再松开 BOOT 键,电脑会出现一个可移动磁盘,将固件库复制进去即可(用 Pico/Pico2 的方式也可以)

讲解视频
【MicroPython】machine.Pin类函数详解
【MicroPython】machine.PWM类函数详解
【MicroPython】machine.ADC类函数详解
【MicroPython】machine.UART类函数详解
【MicroPython】machine.I2C类函数详解
【MicroPython】machine.SPI类函数详解
【MicroPython】rp2.StateMachine类函数详解
C/C++系列
对于 C/C++,建议使用 Pico VSCode 进行开发,这是一款 Microsoft Visual Studio Code 扩展,旨在让您在为 Raspberry Pi Pico 系列开发板创建、开发和调试项目时更加轻松。无论您是初学者还是经验丰富的专业人士,此工具都可以帮助您自信而轻松地进行 Pico 开发。下面我们介绍如何安装该扩展并使用。
- 官网教程:https://www.raspberrypi.com/news/pico-vscode-extension/
- 本教程适用于树莓派Pico、Pico2与本公司开发的RP2040、RP2350系列开发板
- 开发环境默认以 Windows11 为例,其他环境请参考官网教程进行安装
安装VSCode
-
首先,点击下载 pico-vscode 程序包,解压并打开程序包,双击安装 VSCode

注意:如果已安装 vscode 注意检查版本是否为 v1.87.0 或更高版本




安装扩展
-
点击扩展,选择从 VSIX 安装

-
选择 vsix 后缀的软件包,点击安装

-
随后 vscode 会自动安装 raspberry-pi-pico 及其依赖扩展,可以点击刷新查看安装进度

-
右下角显示完成安装,关闭 vscode





配置扩展
-
打开目录 C:\Users\用户名,将整个 .pico-sdk 拷贝至该目录

-
拷贝完成

-
打开 vscode,对 Raspberry Pi Pico 扩展中各个路径进行配置

配置如下:Cmake Path: ${HOME}/.pico-sdk/cmake/v3.28.6/bin/cmake.exe Git Path: ${HOME}/.pico-sdk/git/cmd/git.exe Ninja Path: ${HOME}/.pico-sdk/ninja/v1.12.1/ninja.exe Python3 Path: ${HOME}/.pico-sdk/python/3.12.1/python.exe



新建工程
-
配置完成,测试新建工程,输入工程名、选择路径后点击 Creat 创建工程
测试官方示例,可以点击工程名旁的 Example 进行选择
-
创建工程成功



编译工程
-
选择SDK版本

-
选择 Yes 进行高级配置

-
选择交叉编译链,13.2.Rel1 适用 ARM 核,RISCV.13.3 适用 RISCV 核,这里根据您的需求任意选择其中一个即可

-
CMake 版本选择 Default(前面配置的路径)

-
Ninja 版本选择 Default

-
选择开发板

-
点击 Complie 进行编译

-
成功编译出 uf2 格式文件即可









烧录固件
这里提供两种方法烧录固件
-
使用pico-vscode插件烧录固件
将开发板连接到电脑上,点击Run直接烧录固件
-
手动烧录固件
1.按住Boot按键 2.将开发板连接到电脑上 3.然后会电脑会将开发板识别成一个U盘设备 4.将.uf2文件复制到U盘中,设备就会自动重启,程序烧录成功

导入工程
-
选择工程目录,导入工程

- 导入工程的 Cmake 文件不能有中文(包括注释),否则可能导致导入失败
-
导入自己的工程需要在 Cmake 文件中加一行代码,才能正常切换 pico 和 pico2,否则即使选择 pico2,编译得到的固件仍是适用于 pico 的

set(PICO_BOARD pico CACHE STRING "Board type")


更新扩展
-
离线包中的扩展版本为0.15.2,安装完成后,更新至最新版本


Arduino IDE 系列
安装Arduino IDE
-
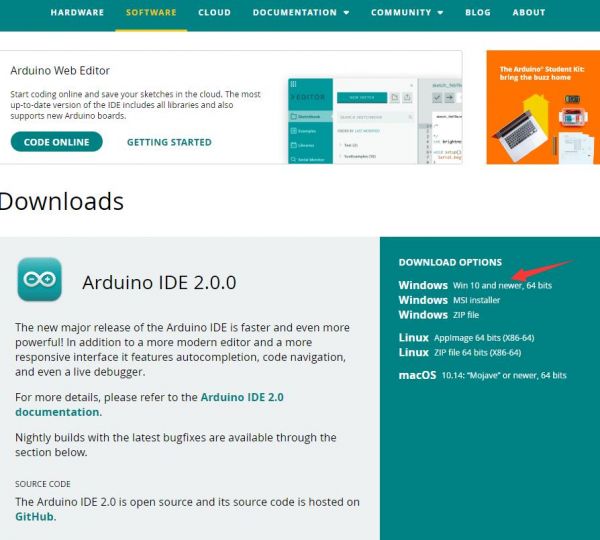
首先到Arduino官网下载 Arduino IDE 的安装包。
-
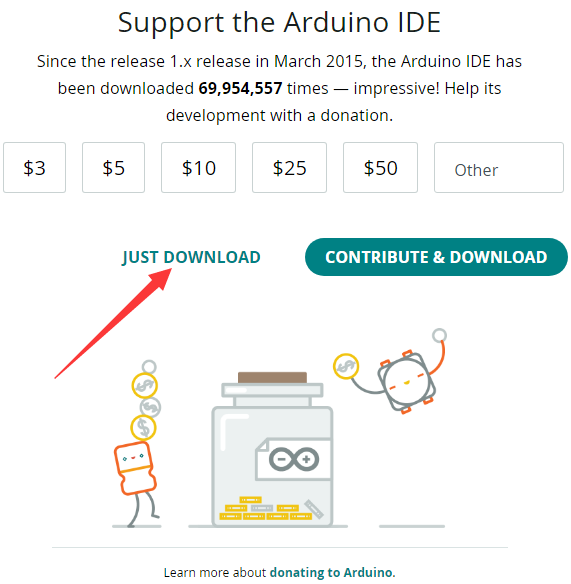
这里选择仅下载就可以了。
-
下载完成后,点击安装。

注意:安装过程中会提示你安装驱动,我们点击安装即可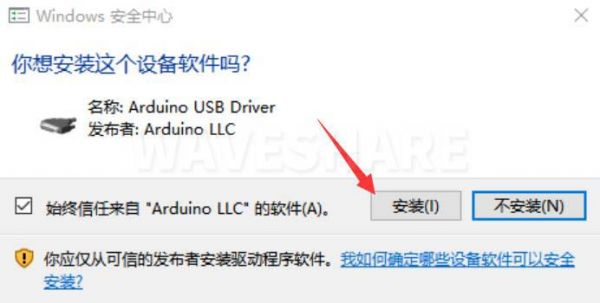




Arduino IDE中文界面
-
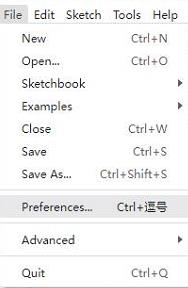
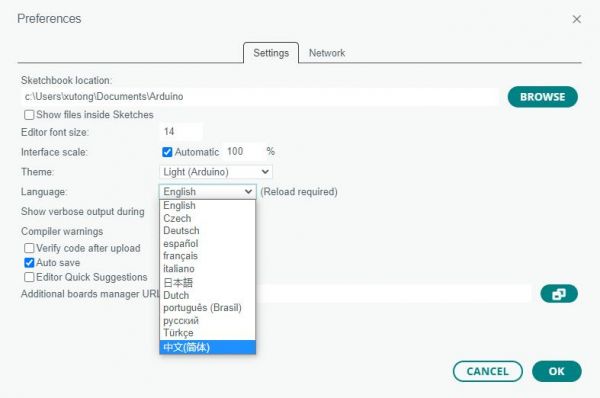
第一次安装完成后,打开 Arduino IDE 全是英文界面,我们可以在 File>Preferences 切换成简体中文。
-
在 Language 里面选择简体中文,点击 OK。


在 Arduino IDE 中安装 Arduino-Pico Core
-
打开 Arduino IDE,点击左上角的文件,选择首选项
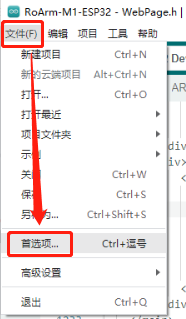
-
在附加开发板管理器网址中添加如下链接,然后点击 OK
该链接已包含 RP2040、RP2350 等版型,最新版型文件请访问 arduino-pico 获取https://github.com/earlephilhower/arduino-pico/releases/download/4.5.2/package_rp2040_index.json
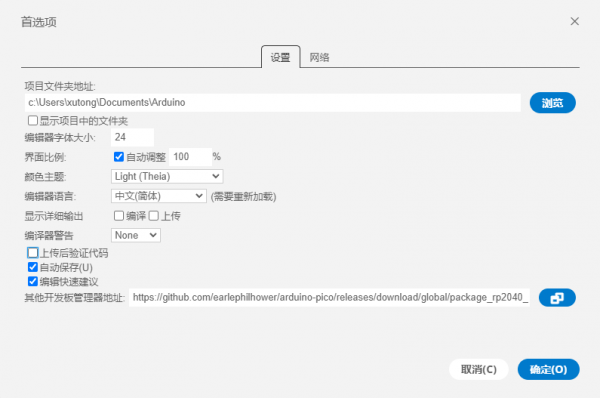
注意:如果您已经有 ESP32 板 URL,您可以使用逗号分隔 URL,如下所示:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/4.5.2/package_rp2040_index.json
-
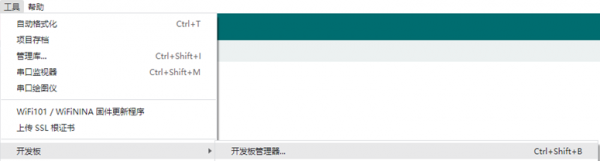
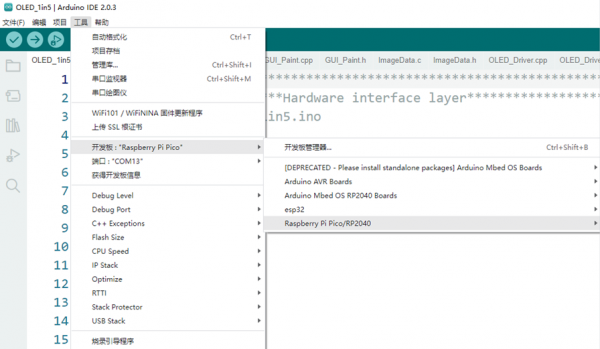
点击工具>开发板>开发板管理器>搜索 Pico,由于我的电脑已经安装过了,所以显示已安装
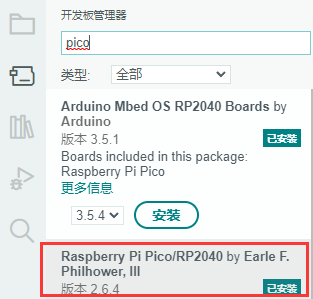




国内用户
- 因为网络原因,国内用户连接 github 并不稳定,我们另外提供了一份安装包,可以跳过在线的过程
- 安装包适用于 RP2040、RP2350
- 若已经成功配置了 Pico 环境,可以直接跳过本章
-
下载rp2040压缩包,将解压的 rp2040 文件夹复制到如下路径下
C:\Users\[username]\AppData\Local\Arduino15\packages
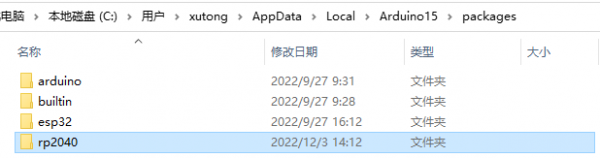
注意:将里面用户名:[username]替换成自己的用户名

第一次上传程序
-
按住 Pico 板上的 BOOT 按键,将 Pico 通过 Micro USB 线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。
- 下载程序,打开 arduino\PWM\D1-LED 路径下的 D1-LED.ino
-
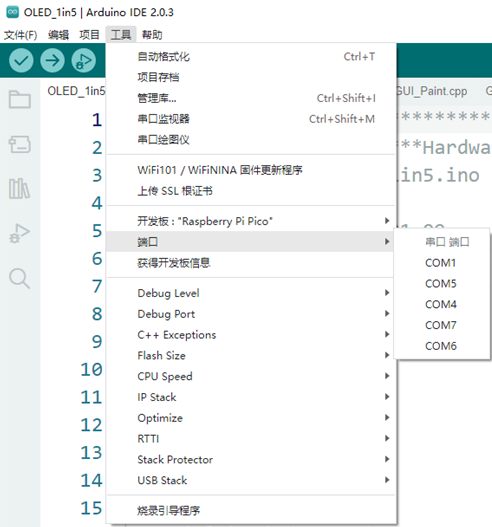
点击工具>端口,记住已有的 COM,不需要点击这个 COM(不同电脑显示的 COM 不一样,记住自己电脑上已有的 COM)
-
用 USB 线将驱动板和计算机连接起来,再点击工具>端口,第一次连接选择 uf2 Board,上传完成后,再次连接就会多出一个 COM 口

-
点击工具>开发板>Raspberry Pi Pico>对应版型(Raspberry Pi Pico、Raspberry Pi Pico 2等)

- 设置完成后,点击向右箭头将上传程序






- 如果期间遇到了问题,需要重新安装或者更换Arduino IDE版本时,卸载Arduino IDE需要卸载干净,卸载软件后需要手动删除C:\Users\[name]\AppData\Local\Arduino15这个文件夹内的所有内容(需要显示隐藏文件才能看到) 再重新安装
开源例程
MircoPython视频例程(github)
MicroPython固件/Blink例程(C)
树莓派官方C/C++示例程序 (github)
树莓派官方micropython示例程序 (github)
Arduino官方C/C++示例程序 (github)
技术支持
联系人:黄康信
EMAIL:3005423122@qq.com
电话:0755-83040712
QQ:3005763927
微信:扫下方二维码添加
