CM4-DUAL-ETH-WIFI6-BASE
| |||||||||||||||||||||||||
| |||||||||||||||||||||||||


说明
产品概述
我是树莓派计算模块4代的IO板,CM4-DUAL-ETH-WIFI6-BASE是一款可以搭配树莓派 Compute Module 4 使用的底板,并且支持7~36V DC供电,板载三路USB 2.0,WIFI6,双网口,适用于软路由等需要多网口场景。
使用注意事项
1:禁止带电时拔插除USB和HDMI之外的任何设备
2:在连接前确认风扇电压,支持5V 和 12V 默认连接12V,切换请修改FAN_VCC的电阻
3:Type C 接口仅仅是用作USB SLAVE 接口烧录镜像,不可以用做供电。
4:CM4在正常使用时,需要为其提供至少12V 1.5A 的供电。否则可能出现自动关机,降频等等问题。
5:关于Opwenwrt见使用说明。
6:此扩展板不支持POE功能。
产品尺寸
CM4-DUAL-ETH-WIFI6-BASE

Compute_Module 4 核心板

板载资源

| 标号 | 名称 | 说明 | |
| 1 | CM4 连接器 | 适用于 Compute Module 4 的所有版本 | |
| 2 | 40PIN GPIO 接口 | 方便连接各种 HAT 模块 | |
| 3 | RJ45 千兆网口 | RJ45 千兆网口,支持 10/100/1000M 网络接入 ETHERNET 0: CM4 原生网口 ETHERNET 1: USB 扩展网口 | |
| 4 | RJ45 百兆网口 | RJ45 百兆网口,支持 10/100 网络接入 ETHERNET 0: CM4 原生网口 ETHERNET 1: USB 扩展网口 | |
| 5 | USB 2.0 接口 | 3 路 USB 2.0 接口,支持各种 USB 设备插入 | |
| 6 | M.2 连接器 | M.2 E KEY 连接器,支持2230、2240两种规格 | |
| 7 | HDMI 接口 | 双路 HDMI 接口,支持双 4K 30fps 输出 | |
| 8 | RTC 电池连接座 | 可接入 CR1220 纽扣电池 | |
| 9 | CAM 接口 | 双路 MIPI CSI 摄像头接口 | |
| 10 | DC 供电接口 | 7~36V DC 宽电压供电 | |
| 11 | 双 LED 灯座 | 红灯:树莓派电源指示灯 绿灯:树莓派工作状态指示灯 | |
| 12 | Micro SD 卡接口 | 用于接入带系统的 Micro SD 卡,以启动 Compute Module 4 Lite | |
| 13 | FAN 接口 | 方便接入散热风扇,支持调速和测速 | |
| 14 | DISP1 接口 | MIPI DSI 显示接口,DISP1 接口 | |
| 15 | USB SLAVE 接口 | Compute Module 4 eMMC 版本可通过此接口烧录系统镜像 | |
| 16 | 百兆网口芯片 | RTL8152 百兆网口芯片 |

| 标号 | 名称 | 说明 | |
| 17 | USB HUB | USB 2.0 HUB 芯片 | |
| 18 | 系统功能切换 | BT_DIS: 蓝牙禁用,仅供带天线的 CM4 版本使用 WiFi_DIS: WiFi 禁用,仅供带天线的 CM4 版本使用 WP_DIS: 防止 EEPROM 被改写 | |
| 19 | IO-VREF 选择 | CM4 IO 逻辑电压切换 3.3V 或者 1.8V | |
| 20 | FAN 供电选择 | 可选择 5V 或 12V 电压驱动风扇 | |
| 21 | RTC 中断管脚切换 | PI-RUN: RTC 触发中断 CM4 重启 GN-EN: RTC 触发中断 CM4 断电 D4: RTC 触发中断 D4 管脚 | |
| 22 | RTC/FAN I2C 总线选择 | SDA0/SCL0: I2C-10 和 CSI/DSI 共用 GPIO3/2: I2C-1 和 40PIN 共用 |
注意事项
禁止带电时拔插任何设备
镜像烧录
RTC FAN
FAN
如图所视,根据电阻位置切换FAN电压,默认12V。

风扇PWM管脚使用GPIO18控制
RTC
RTC芯片:PCF85063A
默认I2C:I2C1
I2C地址:0x51
sudo nano /boot/config.txt #在最后添加 dtparam=i2c_arm=on dtoverlay=i2c-rtc,pcf85063a #在dtparam=audio=on前面添加# 号 #dtparam=audio=on #保存退出,重启 sudo reboot
Hwclock简单使用
同步系统时钟 -> 硬件时钟
sudo hwclock -w
同步硬件时钟 -> 系统时钟
sudo hwclock -s #需要关闭网络,或者关闭网络对时,否则会被改回去
设置硬件时钟时间:
sudo hwclock --set --date="9/8/2021 16:45:05"
查看硬件时钟
sudo hwclock -r
显示版本信息
sudo hwclock --verbose
CSI DSI
新版本(Bookworm)
DSI屏幕默认是800x480分辨率的屏幕,其他分辨率的屏幕请参考对应的WIKI
使用官方地板 Compute Module 4 IO Board 注意需要连接J6跳线帽
DSI
#在config.txt中添加内容 sudo nano /boot/firmware/config.txt #DSI0 dtoverlay=vc4-kms-dsi-7inch,dsi0 #DSI1 dtoverlay=vc4-kms-dsi-7inch,dsi1
CSI
| 型号 | CAM0设置语句 | CAM1设置语句 |
|---|---|---|
| OV9281 | dtoverlay=ov9281,cam0 | dtoverlay=ov9281,cam1 |
| IMX290/IMX327 | dtoverlay=imx290,clock-frequency=37125000,cam0 | dtoverlay=imx290,clock-frequency=37125000,cam1 |
| IMX378 | dtoverlay=imx378,cam0 | dtoverlay=imx378,cam1 |
| IMX219 | dtoverlay=imx219,cam0 | dtoverlay=imx219,cam1 |
| IMX477 | dtoverlay=imx477,cam0 | dtoverlay=imx477,cam1 |
| IMX296 | dtoverlay=imx296,cam0 | dtoverlay=imx296,cam1 |
| IMX708 | dtoverlay=imx708,cam0 | dtoverlay=imx708,cam1 |
sudo reboot
注意:
1:单口摄像头只能再CAM0上工作,即单独使用CAM1口不行。但单独使用CAM0口可以,连接双摄像头是都可以 2:如果出现识别到设备,启动提示“ Camera frontend has timed out!” ,请更新“sudo rpi-update”
测试摄像头
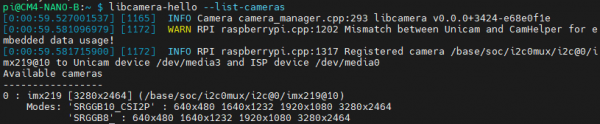
- 输入摄像头检测指令,此时可以看到摄像头已经被检查到了
libcamera-hello --list-cameras
- 显示摄像头画面到桌面
libcamera-hello -t 0
- 拍摄照片
libcamera-jpeg -o test.jpg
- 录制一个10s的视频
libcamera-vid -t 10000 -o test.h264

其他命令
检查摄像头是否被检测到
libcamera-hello --list-cameras
打开对应的摄像头
libcamera-hello --camera 1 libcamera-hello --camera 0
拍摄照片
libcamera-jpeg -o test.jpg #可以添加 --camera 来指定摄像头
#新系统使用双摄像头 #在config.txt中移除camera_auto_detect=1 #camera_auto_detect=1 #添加 dtoverlay=imx219,cam1 dtoverlay=imx219,cam0 #其中imx219是摄像头传感器型号,还有支持其他传感器 dtoverlay=ov5647,cam0 dtoverlay=imx219,cam0 dtoverlay=ov9281,cam0 dtoverlay=imx477,cam0 dtoverlay=imx519,cam0 #然后重启 reboot #打开摄像头 libcamera-hello -t 0 或者 libcamera-hello #其他部分指令: #检查摄像头是否被检测到 libcamera-hello --list-cameras #打开对应的摄像头,预览5秒 libcamera-hello --camera 1 libcamera-hello --camera 0 #拍摄照片 libcamera-jpeg -o test.jpg #拍摄视频 libcamera-vid -t 10000 -o test.h264 #可以添加 --camera 来指定摄像头 #-t <duration> 选项允许用户选择窗口显示多长时间,单位毫秒
更多指令点击我
- 注意:如果使用 DSI 接口显示将会有一个HDMI是禁用的,即使只是编译相应的文件而不连接 DSI 屏幕。
- 两个HDMI任意连接一个是可以输出图像,不限于那个HDMI,如果连接的两个HDMI屏幕那么只有HDMI0有图像输出
- 如果要启用 两个HDMI,请移除config.txt的配置:
- 然后重启即可
参考树莓派手册
老系统版本(Buster和bullseye)
配置文件
CSI 和 DSI默认是关闭的,使用摄像头和DSI的时候会占用I2C-10、I2C-11、I2C-0 三个I2C设备
开机执行如下:
wget https://www.waveshare.net/w/upload/7/75/CM4_dt_blob_Source.zip unzip -o CM4_dt_blob_Source.zip -d ./CM4_dt_blob_Source sudo chmod 777 -R CM4_dt_blob_Source cd CM4_dt_blob_Source/ #执行(V1~V3版本使用) sudo dtc -I dts -O dtb -o /boot/dt-blob.bin dt-blob-disp0-double_cam.dts #执行(V4版本使用) sudo dtc -I dts -O dtb -o /boot/dt-blob.bin dt-blob-disp1-double_cam.dts 在config.txt中修改内容 sudo nano /boot/config.txt 将dtoverlay=vc4-kms-v3d 改为 dtoverlay=vc4-fkms-v3d #在使用任意DSI时,HDMI1没有图像输出,哪怕你没有连接DSI屏幕只要编译的对应的文件,那HDMI1就没有输出了 #如果需要恢复,删除对应的dt-blob.bin 即可: sudo rm -rf /boot/dt-blob.bin #执行完毕 关闭电源 重启
录播测试
再连接摄像头和DSI屏幕:
1: 确保断电状态下连接
2: 连接电源
3: 等待几秒后屏幕启动
4: 如果无法启动,检查/boot/dt-blob.bin 是否存在,如果存在再次重启即可。
旧版本(Buster)
摄像头需要运行raspi-config,选择Interfacing Options->Camera->Yes->Finish-Yes,reboot系统,打开enable camera,然后重启即可保存修改。
测试树莓派摄像头
查看接入的第一个摄像头画面:
sudo raspivid -t 0 -cs 0
查看接入的第二个摄像头画面:
sudo raspivid -t 0 -cs 1
Openwrt
Openwrt具有高自定义以可扩展性能,Openwrt目前越来越受欢迎,相对于常用的无线路由器,openwrt可改固件完全可以让我们根据自己的需求自定义路由器功能,例如可以做单臂路由、自定义路由策略、qos等、内网穿透等。
注意:Openwrt系统在使用过程中出现任何问题,一律不提供任何技术支持,只提供下面的教程和镜像,不在额外提供其他除硬件之外的任何技术支持
镜像
如果使用的地板没有USB3.0,只有USB 2.0 ,并且使用板子USB2.0 无法工作
尝试在config.txt中结尾添加"otg_mode=1 " 即可
编译好没有配置
链接:https://pan.baidu.com/s/1uLJl1SScC_D2xEEQhKK0vw 提取码:yoap
配置好的
链接:https://pan.baidu.com/s/1-yOPeeRxw16kKE_8NFkkcw 提取码:zt70
配置
上面配置的openwrt镜像支持CM4板载wifi,以及RTL8153的驱动。可以把CM4打造成智能路由器,
下面就交大家如何安装Openwrt到树莓派上,实现无线路由器功能,使得局域网内的设备通过无线路由器上网,实现局域网的智能管理。整体的网络拓扑如下所示。

正确开机之后,登陆系统:
电脑接入ETH0接口,然后直接ssh远程登录或者网页登录
配置好的系统默认IP 是:192.168.14.1
没有配置的系统默认IP 是:192.168.1.1
账号:root 没有密码


CM4_Openwrt 教程
树莓派4B_Openwrt 教程
如果觉得网口不够觉得烧录可以购买USB 3.2 Gen1 TO Gigabit ETH RTL8153 扩展网口,如果有ETH/USB HUB HAT RTL8152 也是可以扩展百兆网口也是支持的.
资料
相关链接
官方手册
原理图
3D图
程序
软件
FAQ
b). 检查/boot/dt-blob.bin 文件是否存在,如果存在无法使用,请删除;
售后
联系人:黄康信
EMAIL:3005423122@qq.com
电话:0755-83040712
QQ:3005763927
微信:扫下方二维码添加
