“JetRacer ROS AI Kit”的版本间的差异
(→程序) |
(→开发资料) |
||
| 第160行: | 第160行: | ||
{{FAQ|11、slam建图过程中,远程遥控或者自动建图时存在摄像头回传视频卡顿和slam建图未更新现象,是什么原因?要怎么解决?| | {{FAQ|11、slam建图过程中,远程遥控或者自动建图时存在摄像头回传视频卡顿和slam建图未更新现象,是什么原因?要怎么解决?| | ||
答:摄像头回传视频和地图更新需要较大的带宽和网速,若电脑和小车距离较远或者小车处于拐角位置,则信号受到较大的衰减,造成卡顿的现象;推荐的解决办法是你可以使用手机开启热点,电脑和小车同时连接该热点,保证正常通讯,并将手机放于拐角处作为信号中继点就可以解决【此时,并没有使用你的数据流量,手机仅仅仅是作为信号传输中继】|||}} | 答:摄像头回传视频和地图更新需要较大的带宽和网速,若电脑和小车距离较远或者小车处于拐角位置,则信号受到较大的衰减,造成卡顿的现象;推荐的解决办法是你可以使用手机开启热点,电脑和小车同时连接该热点,保证正常通讯,并将手机放于拐角处作为信号中继点就可以解决【此时,并没有使用你的数据流量,手机仅仅仅是作为信号传输中继】|||}} | ||
| + | {{FAQ|12、为什么SD插入电脑后识别不到?| | ||
| + | 答:由于分区问题,烧写了Jetson Nano的镜像的TF卡在Windows电脑上无法正常识别出盘符,如果需要重新做格式化,在widnows的搜索栏中,搜索磁盘管理并打开磁盘管理界面。找到TF卡所在的移动盘(注意不要认错成其他的盘),右键 选择删除卷,然后新建卷,默认格式化。在默认格式化之后,会重新识别出TF的盘符。此时的TF卡空间内存不对,注意需要用格式化软件再重新对新的盘符做快速格式化。格式化之后,TF卡如果内存空间正常,就可以正常重新烧写新的镜像了。|||}} | ||
| + | {{FAQ|13、如何启用图形桌面?| | ||
| + | 答:系统默认是禁用图形界面,如果需要启用图形桌面,可以使用终端,输入以下指令并重启生效。<br> | ||
| + | sudo systemctl set-default graphical.target<br>|||}} | ||
| + | {{FAQ|14、SD卡识别到的容量不对?| | ||
| + | 答:该扩容方法是针对SD卡或者U盘空间足够,但是镜像烧录后分配的空间小于实际存储设备的空间的。 出现这种情况的原因是提供的Jetbot镜像文件是基于小容量的SD卡配置,导致分区和容量大小被固定。可以通过扩容脚本将文件系统扩容到完整的存储空间大小, | ||
| + | 打开终端,输入以下指令cd /usr/lib/nvidia/resizefs/<br> | ||
| + | sudo chmod 777 nvresizefs.sh<br> | ||
| + | sudo ./nvresizefs.sh<br> | ||
| + | sudo reboot<br>|||}} | ||
</div> | </div> | ||
<div class="tabbertab" title="售后" id="mysupport"> | <div class="tabbertab" title="售后" id="mysupport"> | ||
2023年6月27日 (二) 17:59的版本
| ||||||||||||||||||||||||||
| ||||||||||||||||||||||||||

产品介绍
产品概述
这是一款专门为学习和开发ROS系统的同学定做的高性能AI智能机器小车,采用ROS机器人系统,采用大小脑设计,小脑采用树莓派RP2040微控制器,大脑采用JETSON-NANO-DEV-KIT-A人工智能主控制器。扩展板板将OLED、舵机电机驱动电路、电池保护电路、音频输出电路等集成在一起,免去你焊接电路的烦恼,支持免卸载充电,无需反复拆卸电池。内置IMU姿态传感器,直流编码电机通过PID控制转速,可以输出轮式里程计。软件方面兼容NVIDIA Jetbot 开源项目程序,支持AI深度学习,SLAM建图导航,OpenCV视觉处理、智能语音交互等功能。
产品特点
- 板载三节2600mah 18650电池,高达12.6V电压输出,电机动力更强
- 板载S-8254AA + AO4407A锂电池保护电路,具有防过充、防过放、防过流和短路保护功能
- 板载INA219采集芯片,方便实时监控电池电压,充电电流
- 板载0.91寸128×32分辨率OLED,实时显示小车IP地址,内存,电池电量等情况
- 板载MPU9250 IMU姿态传感器,可以精准判断小车方向。
- 采用编码直流减速电机,支持PID调试,输出轮式里程计
- 采用树莓派RP2040双核微控制器,实时性更好,控制精度更高
- 采用ROS机器人系统开发,大量可视化软件工具,更办法开发强大功能
- 支持IIC从机模式控制,无需移植,完全兼容NVIDIA Jetbot 开源项目程序,轻松实现避障和自主巡线等 AI 功能
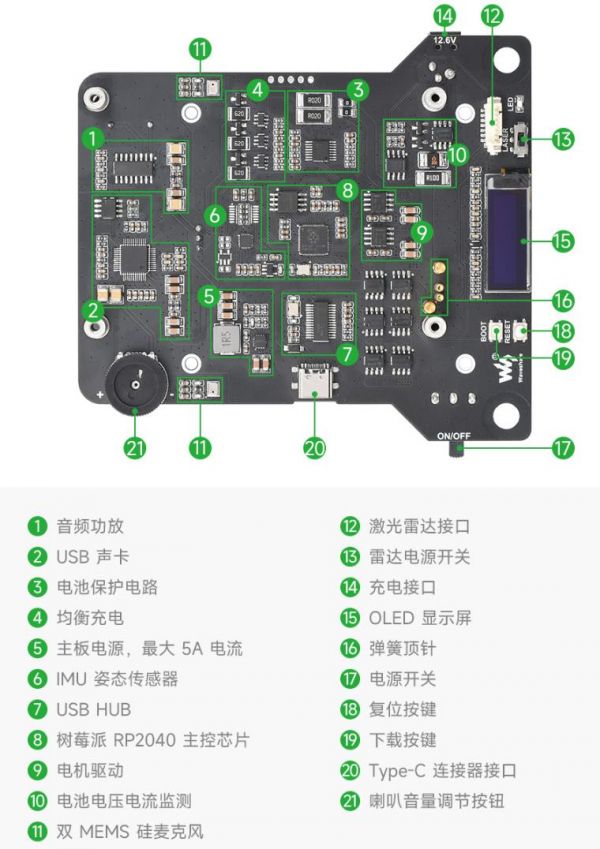
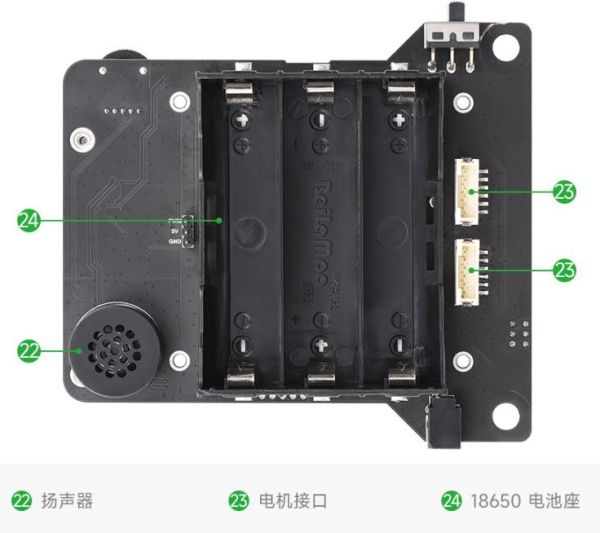
扩展板介绍
- 高度集成的扩展板


使用须知
1:扩展板微控制程序启动时,LED灯常量,此时IMU处于校准状态,校准完成后LED闪烁。若LED不闪烁则程序运行不正常,尝试按RESET重启,或者重新烧录固件程序。
2:IMU处于校准时机器人需要处于水平静止状态。否则导致IMU数据不准确,导致小车坐标处于一直旋转状态。将小车放平静止,按RESET重新启动。
3:扩展板通过USB和I2C和Jetson Nano连接,正常连接后运将会识别到/dev/ttyACM0,/dev/ttyACM1两个串口设备,同时会识别到I2C地址0x60设备。
4:音量调节过大,会导致电流不足声音出现卡顿现象,长时间大音量可能会损害喇叭,请将音量调小到合适位置。
5:启动底盘相关节点出错可以尝试按RESET重启程序后再运行,如果重启后LED没有进入闪烁状态,可以重新下载固件程序。
6:将扩展板Type C接口接到电脑上,按住BOOT按键,然后再按RESET按键松开,RP2040芯片进入下载状态,电脑会识别到U盘,将固件程序拖拽到U盘即可以下载程序。
特别注意事项
注意1:组装时需要先将电源开关拨到OFF一端,断开电源再组装否则带电操作容易导致短路烧坏器件。
注意2:组装时先安装Jetson Nano再安装电池,拆卸时先拆电池在拆Jetson Nano。否则容易导致拆装过程中触碰短路。
注意3:安装Jetson Nano时四个螺柱不要拧紧,四个螺柱拧一半,然后调整一下板子的位置对准顶针后压紧板子再拧紧,直接拧紧也会导致顶针接触不太好。
注意4:首次接上电池有可能会没有电源输出,需要充一下电激活电池保护芯片才会有电源输出。电源开关需要拨到ON的位置。
注意5:电池正极绝缘垫如果弄掉坏了建议不要继续使用容易导致短路起火,拆电池时切忌用螺丝刀撬电池正极容易导致短路要撬电池负极。
锂电池使用注意事项
- 锂聚合物和锂离子电池很不稳定。如果充电或使用不当,可能会导致火灾,人身伤害和财产损失。
- 对电池组充电和放电时,切勿极性连接错误。请勿选用其他劣质的充电器或充电板对锂电池进行充电。
- 请勿混用和使用旧电池和新电池,避免使用其他品牌的电池。
- 如需另购锂电池产品,须确保电池参数与锂电池扩展板兼容,推荐选择正规的电池厂家,并需要自行老化测试确保锂电池能够稳定安全工作。
- 锂电池具有循环寿命,请在达到使用寿命或使用两年时(以先到者为准),用新电池更换旧电池。
- 请妥善放置电池类产品,远离易燃易爆类物品,远离儿童,避免因保管不慎,引发安全事故。
JetRacer ROS AI Kit 初级教程目录
- JetRacer ROS AI Kit 教程一、组装小车
- JetRacer ROS AI Kit 教程二、安装Jetson nano 镜像
- JetRacer ROS AI Kit 教程三、安装Ubuntu虚拟机 镜像
- JetRacer ROS AI Kit 教程四、配置多机通讯
- JetRacer ROS AI Kit 教程五、机器人移动控制
- JetRacer ROS AI Kit 教程六、使用ROS图形工具查看节点话题
- JetRacer ROS AI Kit 教程七、机器人里程计校准
- JetRacer ROS AI Kit 教程八、启动摄像头节点
- JetRacer ROS AI Kit 教程九、启动激光雷达节点
JetRacer ROS AI Kit 进阶教程目录
- JetRacer ROS AI Kit 教程一、SLAM激光雷达建图
- JetRacer ROS AI Kit 教程二、自主导航
- JetRacer ROS AI Kit 教程三、ROS OpenCV
- JetRacer ROS AI Kit 教程四、ROS智能语音
- JetRacer ROS AI Kit 教程六、Jetson nano 安装ROS系统及环境配置
- JetRacer ROS AI Kit 教程七、Ubuntu 虚拟机安装ROS系统及环境配置
- JetRacer ROS AI Kit 教程八、ROS语音环境配置
- JetRacer ROS AI Kit 教程九、阿克曼运动学分析
JetRacer 教程目录
JetRacer 是一款使用 NVIDIA Jetson Nano 的自主 AI 赛车开源项目。
JetRacer项目库:https://github.com/NVIDIA-AI-IOT/jetracer
DonkeyCar for JetRacer ROS 教程目录
Donkeycar 是用Python 编写的高级自动驾驶库,通过采集图像训练神经网络模型实现自动驾驶功能。详细教程资料可用参考donkeycar官方文档。
donkeyCar项目库:https://github.com/autorope/donkeycar
donkeyCar官方文档:https://docs.donkeycar.com/
资料
程序
原理图
学习资料
- ros官网教程
- Jetson nano使用手册中文版
- Jetson Nano开发套件入门教程
- facenet-120
- GoogleNet
- ssd_mobilenet_v2_coco
- ssd_mobilenet_v2_coco (新)
NVIDIA官方资料
- Jetson Nano 入门教程
- Jetson Nano 使用手册
- Jetson Nano 论坛
- Nvidia Jetson Github
- NVIDIA官方免费AI教程(基于Jetson nano)
- Jetson Nano Module 3D 图纸
- Jetson Nano developer kit (B01)3D图纸
- NVIDA深度学习学院(有相关深度学习的教程提供)
- NVIDIA Multimedia说明文档
开发资料
FAQ
答:系统默认是禁用图形界面,如果需要启用图形桌面,可以使用终端,输入以下指令并重启生效。
答:该扩容方法是针对SD卡或者U盘空间足够,但是镜像烧录后分配的空间小于实际存储设备的空间的。 出现这种情况的原因是提供的Jetbot镜像文件是基于小容量的SD卡配置,导致分区和容量大小被固定。可以通过扩容脚本将文件系统扩容到完整的存储空间大小,
打开终端,输入以下指令cd /usr/lib/nvidia/resizefs/
sudo chmod 777 nvresizefs.sh
sudo ./nvresizefs.sh
技术支持
联系人:张工
邮箱:3004637648@qq.com
QQ:3004637648
微信:扫下方二维码添加
