| 产品 |
RPLIDAR A1 |
RPLIDAR C1 |
D500 LiDAR Kit |
D200 LiDAR Kit |
DTOF LIDAR STL27L |
| 测量半径 |
0.15~12.00m |
0.05~12.00m
(白色物体,
70% 反射率);
0.05~6.00m
(黑色物体,
10% 反射率) |
0.03~12.00m |
0.15~8.00m |
0.03~25.00m |
| 测距精度 |
实际距离的 1% (≤3m) |
±30mm |
±10mm (0.03~0.5m)
±20mm (0.5~2m)
±30mm (2~12m) |
白色靶面:
±5mm (0.1~0.5m)
±10mm (0.5~1m)
实际距离的 ±1.0% (1~6m)
实际距离的 ±1.5% (6~8m) |
±15mm (0.03~2m)
±20mm (2~8m)
±30mm (>8m) |
黑色靶面:
±7mm (0.1~0.5m)
±12mm (0.5~1m)
实际距离的 ±1.2% (1~4m)
实际距离的 ±1.5% (4~6m)
NA (6~8m) |
| 扫描频率 |
5.5Hz |
8~12Hz
(典型值 10) |
6~13Hz
(典型值 10) |
默认 6Hz,2~8Hz 外部可控 |
10Hz |
| 扫描角度 |
360° |
360° |
360° |
360° |
360° |
| 测距频率 |
8000Hz |
5000Hz |
5000Hz |
4000Hz |
21600Hz |
测量
分辨率 |
≤实际距离的 1%
(测距 ≤12m)
≤实际距离的 2%
(测距 12~16m) |
15mm |
15mm |
≈17mm |
15~30mm |
| 激光波长 |
785nm |
905nm |
895~915nm
(典型值 905) |
775~800nm
(典型值 793) |
895~915nm
(典型值 905) |
| 通信接口 |
UART |
UART、TTL |
UART |
UART |
UART |
| 供电电压 |
5V |
5V |
5V |
DC 5V±10% |
4.5~5V |
| 产品功耗 |
0.5W |
1.15W |
1.45W |
≤1.5W |
1.45W |
| 工作电流 |
100mA |
230mA |
290mA |
≤300mA |
290mA |
| 产品重量 |
248g |
110g |
45g |
101g |
46.1g |
| 工作温度 |
0~40°C |
-10~40°C |
-10~45°C |
-10~50°C |
-10~50°C |
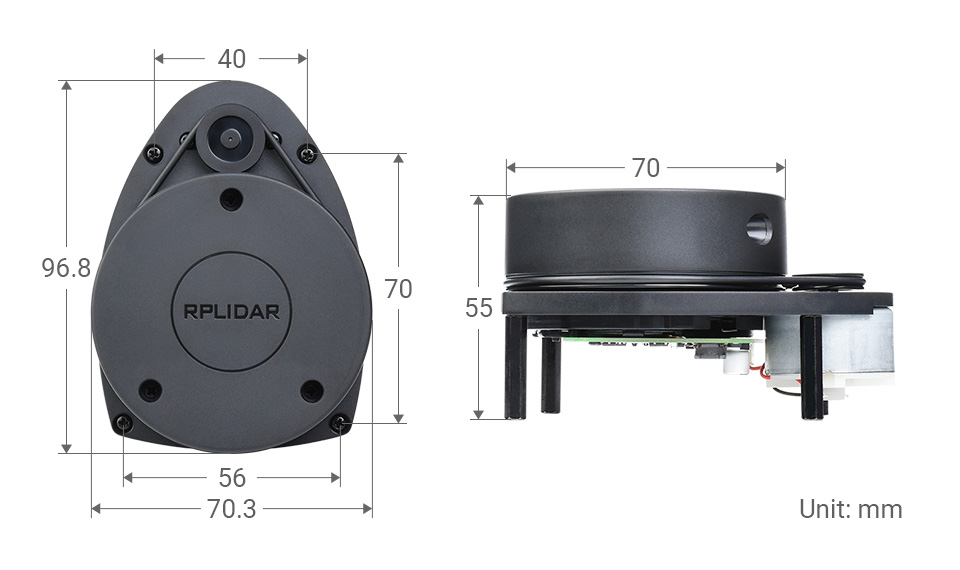
| 产品尺寸 (mm) |
96.80×70.30
×55.00 |
55.60×55.60
×41.3 |
54.00×46.29
×35.00 |
96.30×59.80
×38.80 |
54.00×46.29
×34.80 |