ROS AI 智能机器人
JetRacer AI 小车升级版
![JetRacer ROS AI Kit ROS AI 赛车机器人]()
适用于雷达建图、自主导航、自动驾驶、智能语音、目标检测、人脸识别等多个领域的科研算法验证需求,不仅兼容 NVIDIA JetRacer 开源项目程序,而且硬件全面升级,性能更强
![JetRacer ROS AI Kit ROS AI 赛车机器人]()
|
JetRacer 原版 |
JetRacer ROS 版 |
| 外观 |
![JetRacer 原版]() |
![JetRacer ROS 版]() |
| 微控制器 |
无 |
树莓派 RP2040 芯片 |
| 电机 |
37-520 直流减速电机
减速比 1:10
空载转速 740RPM
|
37-520 编码金属电机
减速比 1:30
空载转速 333RPM
|
| 电机编码器 |
无 |
11 线 AB 霍尔测速传感器,支持轮式里程计 |
| IMU 传感器 |
无 |
ICM20948/MPU9250 |
| 激光雷达 |
无 |
RPLIDAR A1 |
| 音频接口 |
无 |
双麦克风,单扬声器,支持智能语音 |
| 建图导航 |
不支持 |
支持 |
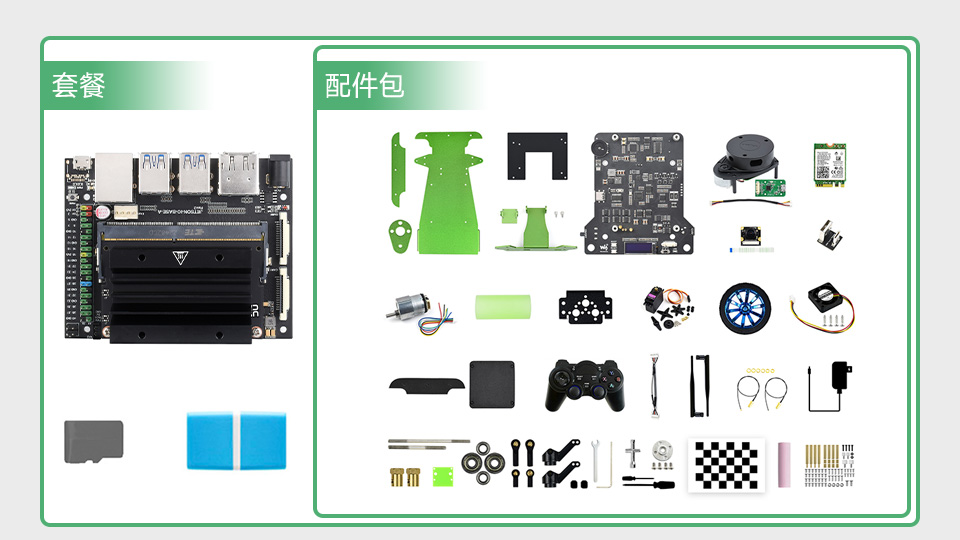
套餐配置选择
![JetRacer ROS AI Kit ROS AI 赛车机器人 DonkeyCar 开源项目]()
说明:本产品提供了套餐 A 、套餐 B 和配件包三种方案,套餐 A (英伟达套件)和套餐 B (微雪套件)仅主控板套件不一样,配件包不包含主控板套件,具体配置详情请以配置清单为准。
Jetson Nano 套件对比
![Jetson Nano 扩展板对比]()
英伟达套件
英伟达 B01 套件是由英伟达官方生产的套件,板载了包括 40PIN GPIO 扩展接口、千兆网口、USB 3.0 接口、HDMI 接口、DIS 接口和 CSI 摄像头接口等多种接口,B01 套件板载的是非生产规格的 Jetson Nano 模组,主要用于开发和软件测试。
![Jetson Nano 扩展板对比]()
微雪套件
Jetson Nano DEV KIT 是微雪电子在 Jetson Nano B01 eMMC 版本模组的基础上搭配自产底板 JETSON-IO-BASE-A 组成的 B01 代替方案,性能与外观上与英伟达 B01 套件基本一致,Jetson Nano B01 eMMC 版本更适合用户部署于生产环境中。
| 版本选择 |
套餐 A |
套餐 B |
配件包 |
必要的配件:
JetRacer ROS 扩展板、智能车底盘、摄像头、无线网卡、激光雷达、大功率编码电机、舵机、轮胎、电池、散热风扇、游戏手柄、电源等 |
|
|
|
| 64 GB 内存卡、读卡器 |
|
|
|
英伟达套件:
Jetson Nano Developer Kit (B01) |
|
|
|
微雪套件:
Jetson Nano Module 主控板、
微雪扩展板、
NVIDIA 官方散热片 |
|
|
|
具体配置详情请以配置清单为准
![JetRacer ROS AI Kit ROS AI 赛车机器人 ROS课程]()
| 课程分类 |
课程名称 |
时长 |
| ROS 入门 |
1 ROS 入门 21 讲•古月 (含考试证书及彩蛋2讲) |
7.5 |
| 2 ROS 基础导论 |
2 |
| 3 如何在 Gazebo 中实现移动机器人仿真 |
2 |
| 4 从 “零” 做一台 ROS 移动机器人 |
1 |
| 5 ROS2 基础原理与应用 |
2.5 |
| 6 如何将 ROS 用于实际机器人开发 |
1.5 |
| 7 高效入门 ROS 学习的工具 |
1 |
| 8 ROS 移动机器人实战 |
3.5 |
| 9 ROS2 入门 21 讲•古月 |
7.5 |
| 10 ROS 入门 21 讲补充笔记 |
0.5 |
| ROS 进阶 |
11 ROS2 导航框架解析 |
1.5 |
| 12 ROS2 机器人高效编程 |
23 |
| 规划感知 |
13 ROS 常用 SLAM 功能包使用指南 |
2 |
| 14 如何实现 ROS 机器人自主导航 |
2 |
| 15 ROS 机器视觉开发入门 |
2 |
| 16 ROS 机器人导航中的关键功能包 |
1 |
| 17 MATLAB 玩转树莓派 |
0.5 |
| 18 使用 NeMo 快速完成自动语音识别应用 |
0.5 |
| 19 分享一些目标检测里的处理方式 |
1 |
| 20 ROS 机器人 SLAM 与导航开发 |
1.5 |
|
合计 (小时) |
64 |
智慧大小“脑”设计
大脑采用 Jetson Nano 套件,本产品提供了英伟达套件和微雪套件可供选择,除了微雪 Jetson Nano 套件配置了 Jetson Nano Module 核心模块 16GB eMMC 版本,其余配置基本与英伟达套件一致,主控板套件板载了 4GB 内存,性能更强,负责人工智能 (AI),语音处理,视觉处理,建图导航等层次功能;
小脑采用树莓派 RP2040 双核微控制器,实时性更好,控制精度更高,负责姿态数据采集,运动控制;
大小脑采用 USB 通信,传输速度更快,速度远超串口
![JetRacer ROS AI Kit ROS AI 赛车机器人智慧大小“脑”设计]()
此处图片展示为微雪 Jetson Nano 套件
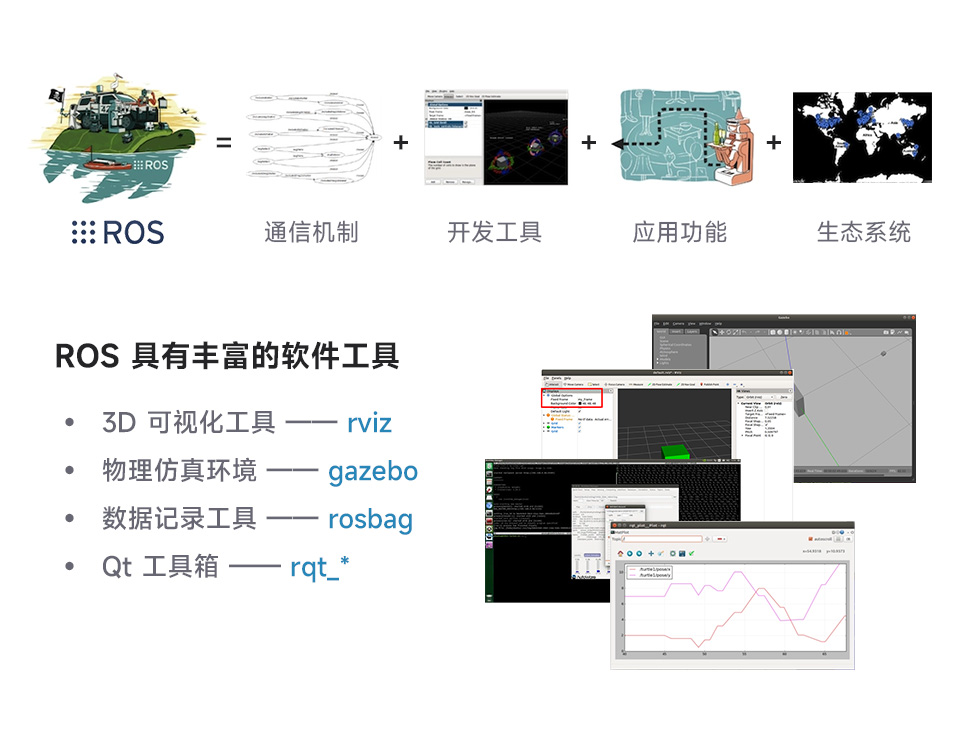
基于 ROS 机器人操作系统开发
ROS (Robot Operation System) 是适用于机器人的开源操作系统,包含一套机器人设计的软件库和工具。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息的传递,以及包管理。ROS 可简化机器人设计,是世界上主流的机器人软件框架。
![JetRacer ROS AI Kit ROS AI 赛车机器人基于 ROS 机器人操作系统开发]()
支持 I2C 从机模式控制
完全兼容 JetRacer 原程序
JetRacer ROS AI Kit 是使用 NVIDIA Jetson Nano 的自主 AI 赛车,使用网络浏览器进行交互编程,并通过 torch2trt 转换器 (PyTorch 转 TensorRT) 优化可实现高帧率处理,轻松实现更快速的自主巡线驾驶。
![JetRacer ROS AI Kit ROS AI 赛车机器人支持 I2C 从机模式控制]()
高校人工智能教学和竞速比赛适用智能小车
支持 DonkeyCar 开源项目
深度学习 自动驾驶小车
DonkeyCar 利用深度学习神经网络开源框架 Keras/Tensorflow,搭配计算机视觉库 OpenCV,实现自动驾驶小车。
![JetRacer ROS AI Kit ROS AI 赛车机器人 DonkeyCar 开源项目]()
![JetRacer ROS AI Kit ROS AI 赛车机器人 DonkeyCar 开源项目]()
SLAM 激光雷达构建地图
里程计,IMU,激光雷达,EKF 多传感器等融合建图
支持 Gmapping, Hector, Karto, Cartographer 建图算法
![JetRacer ROS AI Kit ROS AI 赛车机器人 SLAM 激光雷达构建地图]()
路径规划 自主导航 动态避障
AMCL 自适应蒙特卡洛定位Move_base 自主导航
支持单点导航,多点巡逻导航,边导航边建图
![JetRacer ROS AI Kit ROS AI 赛车机器人单点导航]()
单点导航
发布导航目标位置,机器人将自动规划路径导航到目标位置
![JetRacer ROS AI Kit ROS AI 赛车机器人多点巡逻导航]()
多点巡逻导航
添加导航点,机器人将在导航点之间巡航导航
![JetRacer ROS AI Kit ROS AI 赛车机器人边导航边建图]()
边导航边建图
可以发布导航目标位置,机器人将自动探索路径导航到目标点,而且边扫描地图边发布
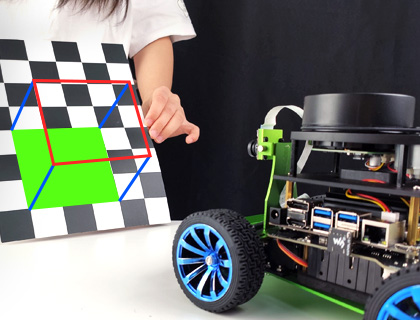
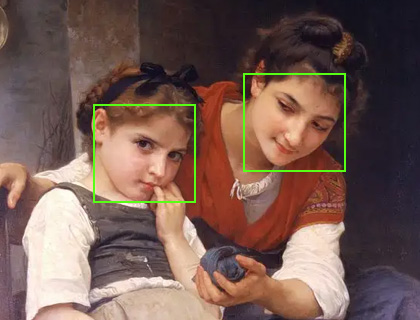
OpenCV 视觉处理
机器人集成 OpenCV 机器视觉库,提供大量算法例程
智能语音处理,机器人语音交互
支持远程语音对讲,语音合成,语音检测,语音识别,人机语音交互
![JetRacer ROS AI Kit ROS AI 赛车机器人智能语音处理,机器人语音交互<]()
远程语音实时传输,让机器人传递对话
电脑端和机器人进行实时语音传输,可以实现远程双向通话
语音合成播放,让机器人说话
将文字转化为自然流畅的人声并播放
发送文本话题给机器人就可以听到机器人说话了
语音检测,让机器人知道我说话
检测音频流中的有声音部分,消除静音部分
只录取人说话的部分
语音识别,让机器人明白我说的话
将音频识别成文字
智能语音交互,让机器人有大脑
可以回答我的问题
机器人识别到人说话并通过语音回复,实现人和机器人对话聊天
系统框图
![JetRacer ROS AI Kit ROS AI 赛车机器人系统框图]()
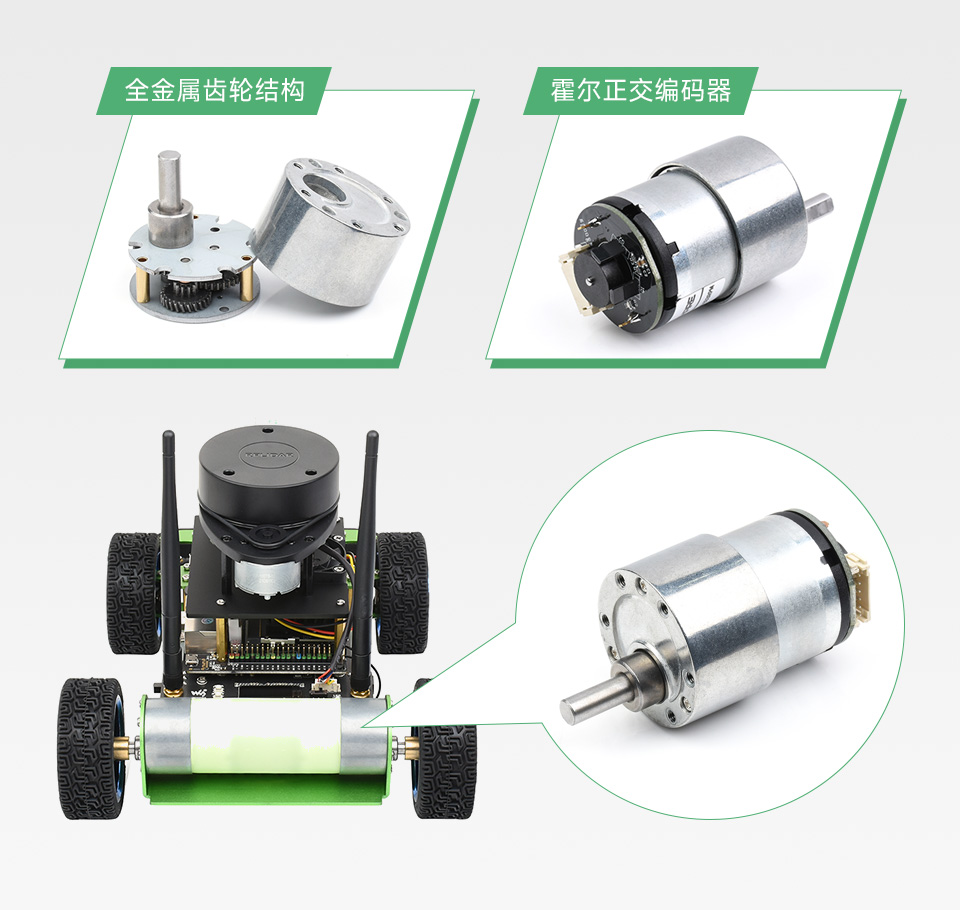
大功率编码器直流减速电机
优质碳刷、全金属齿轮结构、精度高、运行噪音低,11 线 AB 相霍尔测速编码器,支持 PID 闭环控制调速来推算轮式里程计信息
![JetRacer ROS AI Kit ROS AI 赛车机器人大功率编码器直流减速电机]()
IMU 惯性传感器
内置高精度九轴运动姿态传感器,采用扩展卡尔曼滤波器融合轮式里程计和 IMU 数据,可生产更高精度的机器人姿态
![JetRacer ROS AI Kit ROS AI 赛车机器人IMU 惯性传感器]()
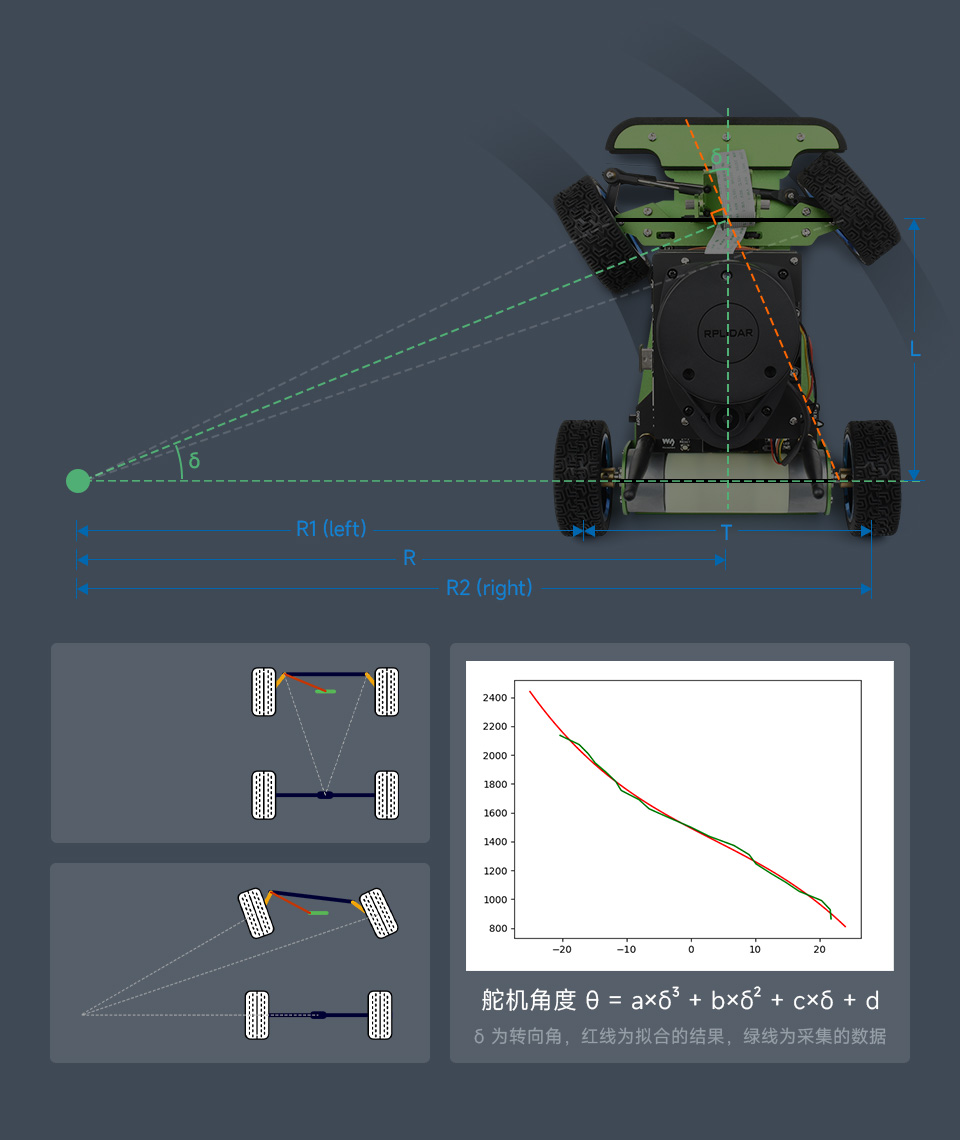
类汽车转向结构
JetRacer ROS 机器人采用类阿克曼转向结构,前轮舵机转向结合后轮差速转向。提供详细的运动学模型分析,采用多项式拟合输出转向角,小车转向角度更精准。
![JetRacer ROS AI Kit ROS AI 赛车机器人类汽车转向结构]()
360 度激光测距雷达
对周围环境 360 度扫描测距,从而获得机器人周围环境轮廓图
![JetRacer ROS AI Kit ROS AI 赛车机器人 360 度激光测距雷达]()
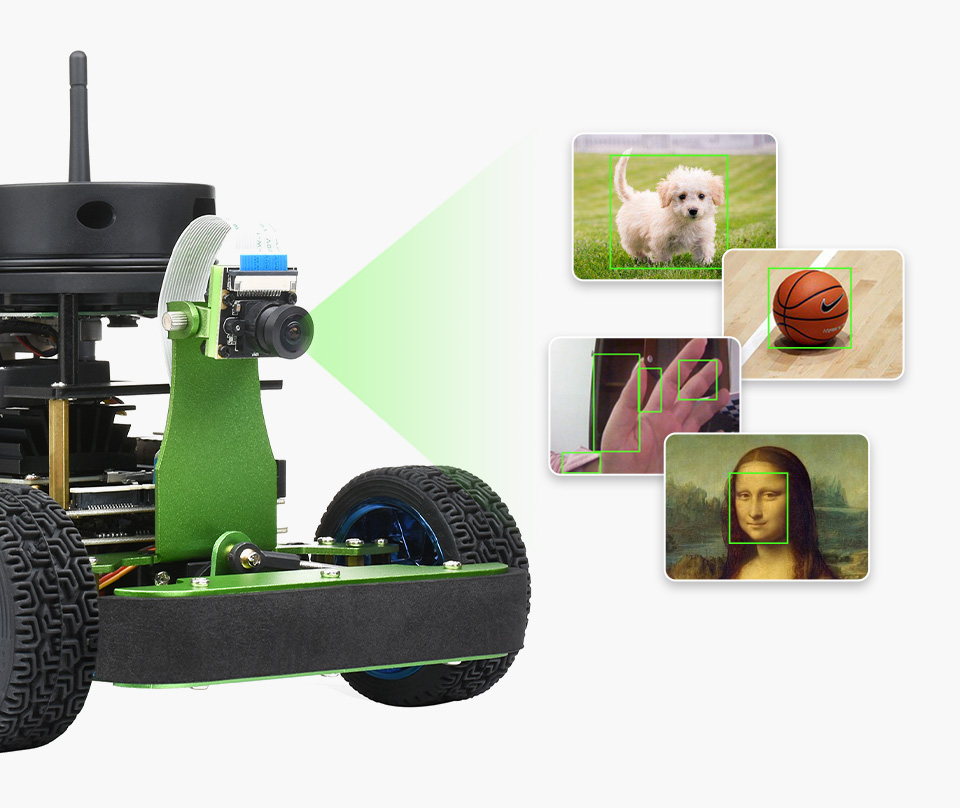
800 万像素 160 度视角摄像头
索尼 IMX219 传感器,3280 × 2464 分辨率
适合 OpenCV 视觉开发,物体识别,目标追踪,自动驾驶等 AI 功能
![JetRacer ROS AI Kit ROS AI 赛车机器人 800 万像素 160 度视角摄像头]()
采用 USB 音频芯片
板载两个高质量 MEMS 硅麦克和喇叭,支持立体声录音和立体声播放
从此机器人也有了耳朵和嘴巴,能"听"会"道",轻松实现智能语音交互
![JetRacer ROS AI Kit ROS AI 赛车机器人采用 USB 音频芯片]()
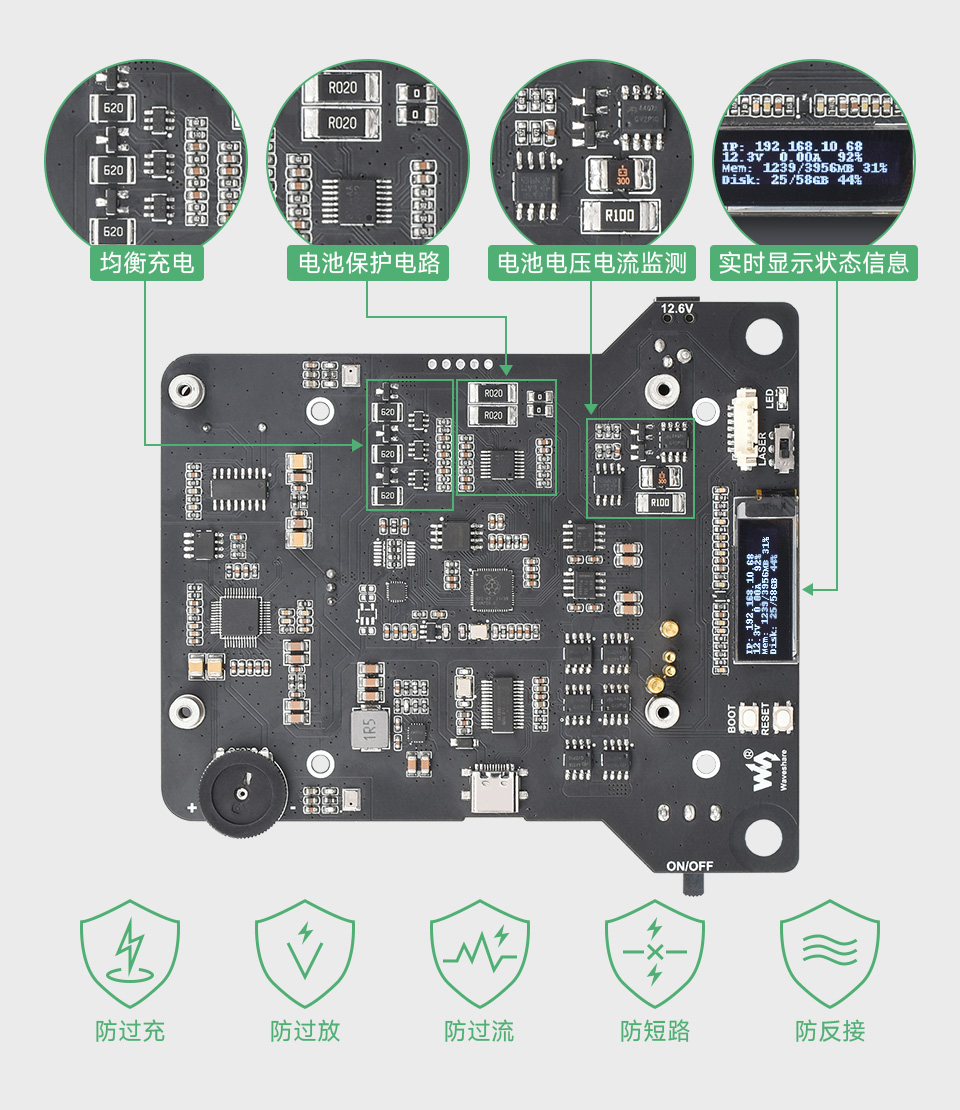
安全稳定的电路设计
板载电池保护电路,防过充、防过放、防过流、防短路和防反接,均衡充电,工作稳定更安全,内置电池检测电路,板载 OLED 实时显示电池的电压、电流和剩余电量
![JetRacer ROS AI Kit ROS AI 赛车机器人安全稳定的电路设计]()
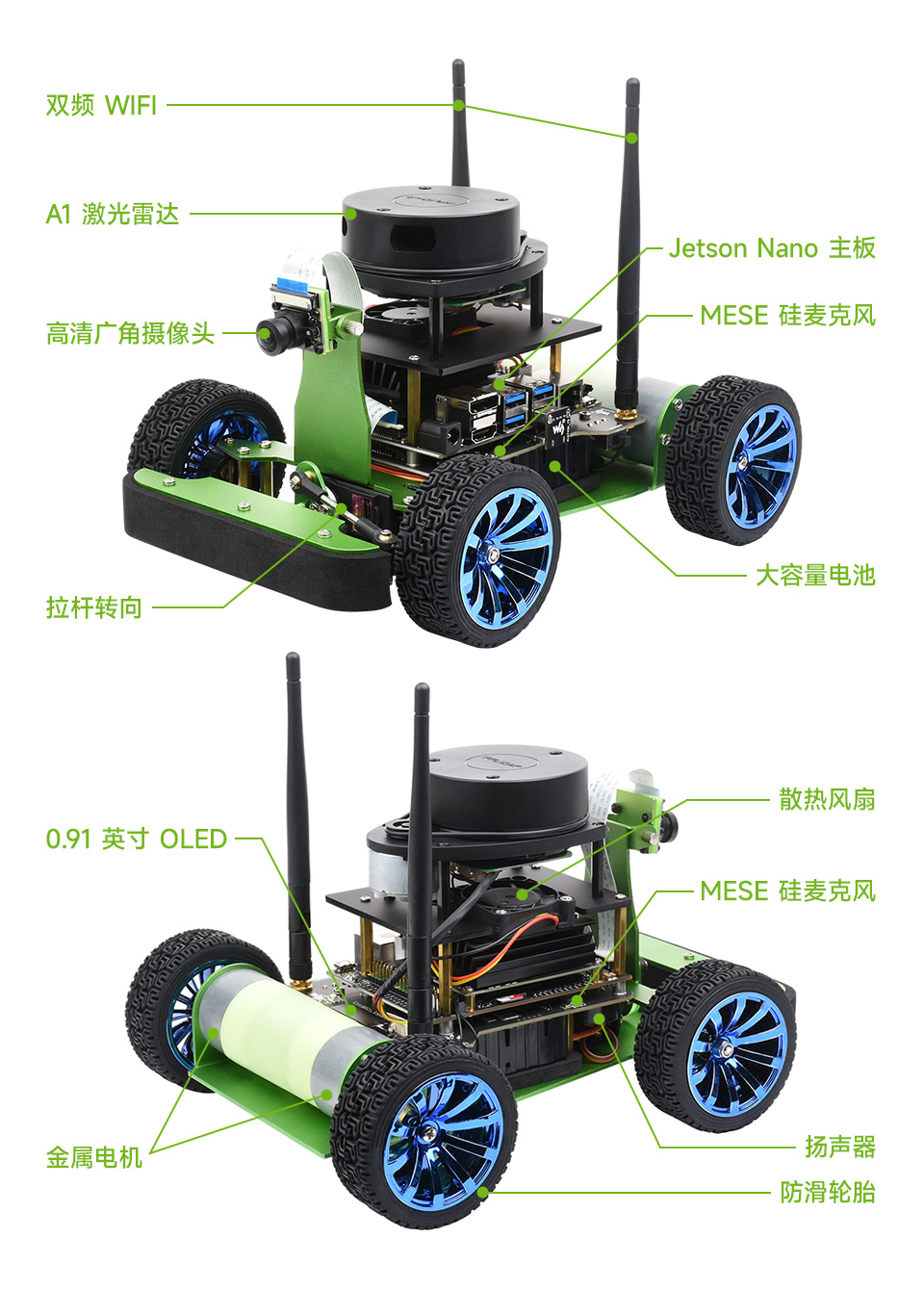
产品结构解析
![JetRacer ROS AI Kit ROS AI 赛车机器人产品结构解析]()
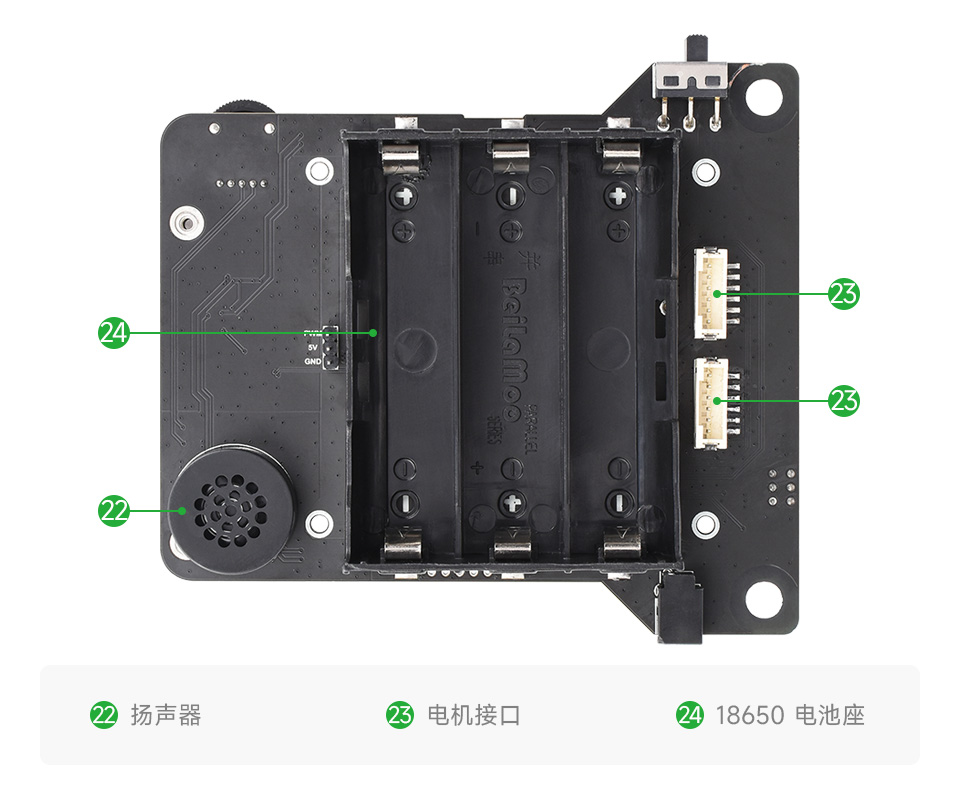
高度集成的扩展板
![JetRacer ROS AI Kit ROS AI 赛车机器人高度集成的扩展板]()
![JetRacer ROS AI Kit ROS AI 赛车机器人高度集成的扩展板]()
包装展示
![JetRacer ROS AI Kit ROS AI 赛车机器人包装展示]()
产品尺寸
![JetRacer ROS AI Kit ROS AI 赛车机器人产品尺寸]()