NVIDIA官方推荐JetBot升级版ROS AI人工智能机器人 大小脑设计雷达建图视觉处理机器车 套餐B(含微雪Jetson Nano套件)
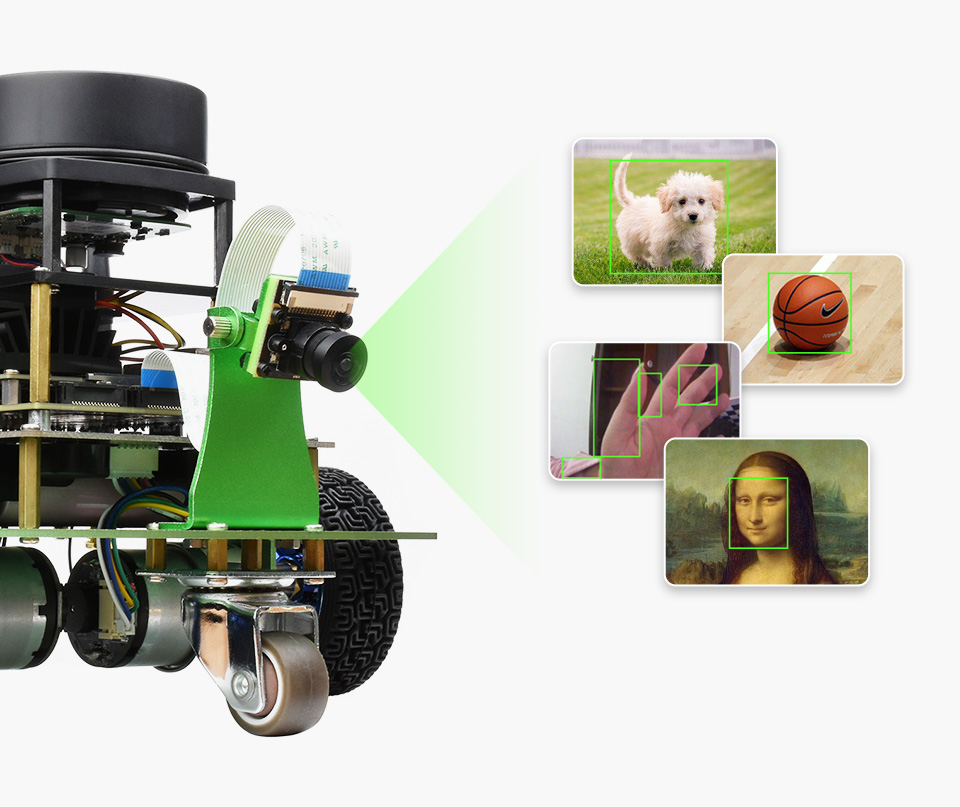
送古月居课程、AI 深度学习,SLAM 建图导航,OpenCV 视觉处理,智能语音交互
型号
JetBot ROS AI Kit套餐 B
SKU
22266
品牌
Waveshare
价格参考
- {{tax.tax_name}}
| 数量 | {{price.num}}+ |
| 价格 |