HexArth
高自由度仿生六足机器人
下位机基于 ESP32

产品特性
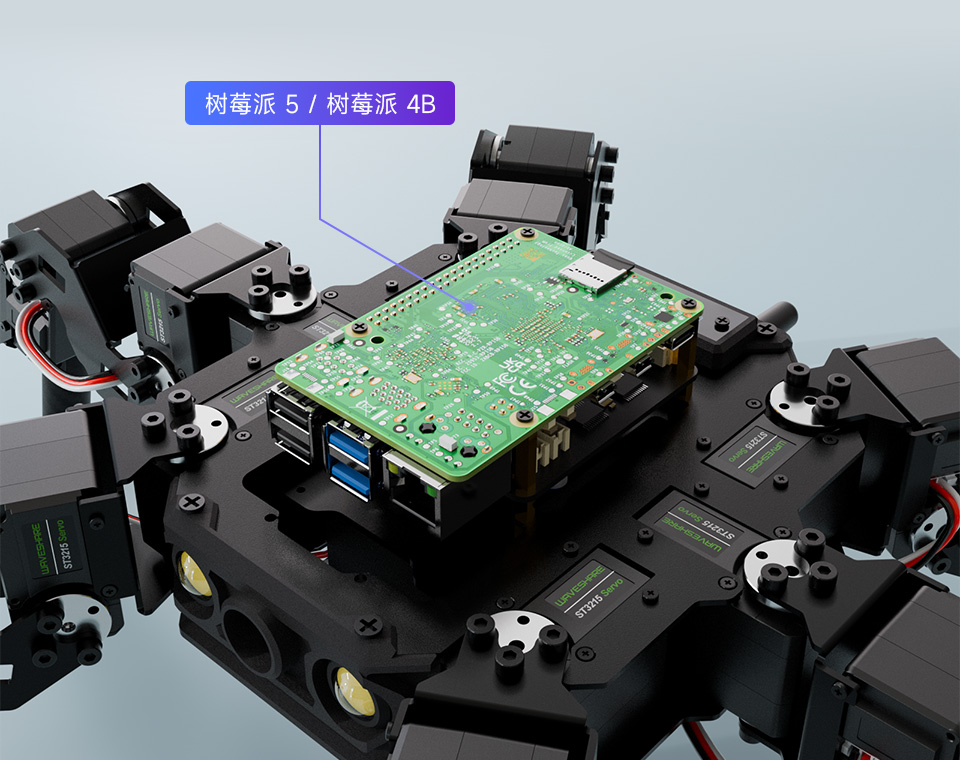
本产品是一款具有高自由度的六足机器人,30kg.cm 大扭矩舵机,结构可靠,搭配可跨平台使用的 Web 应用。以 ESP32 作为下位机进行连杆逆解和步态生成,为上位机分担算力,可安装树莓派 4B / 树莓派 5 作为上位机来运算高阶决策。
- 采用 30kg.cm 串行总线舵机,可实时反馈位置、速度及输入电压等信息
- 下位机用于步态生成和连杆逆解,为上位机分担算力负担并提升步态解算效率
- 结构使用铝合金 + 碳纤维材质,减轻重量的同时也保证了强度
- 可扩展树莓派作为上位机使用,可使用 OpenCV 相关的高阶功能
产品参数
| 基本信息 | |
|---|---|
| 产品名称 | HexArth |
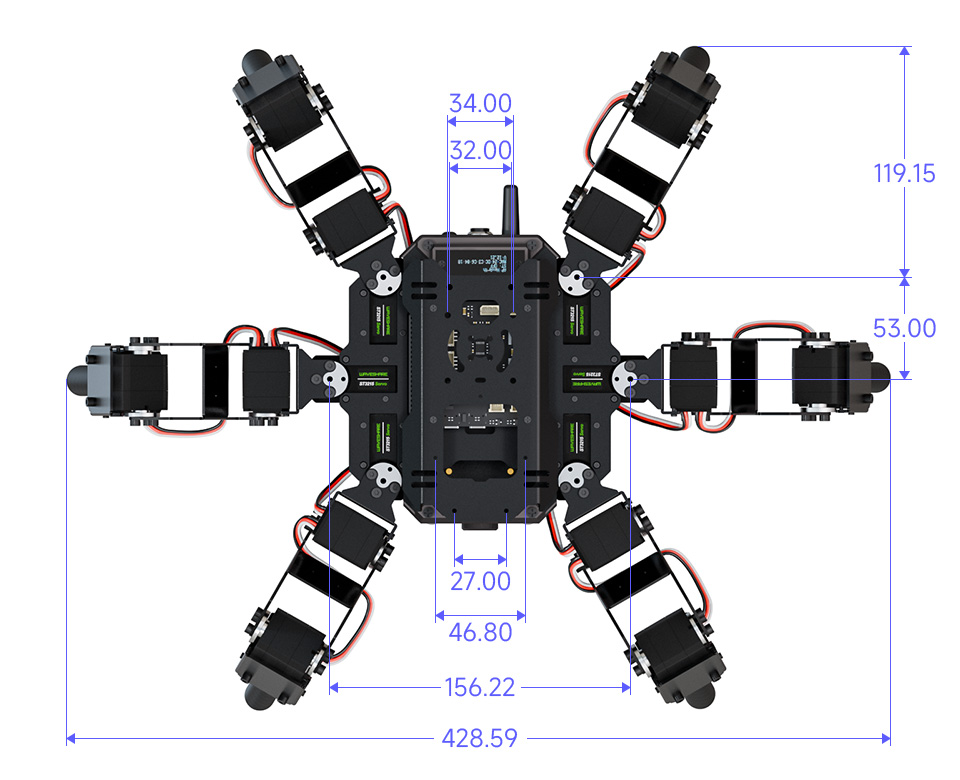
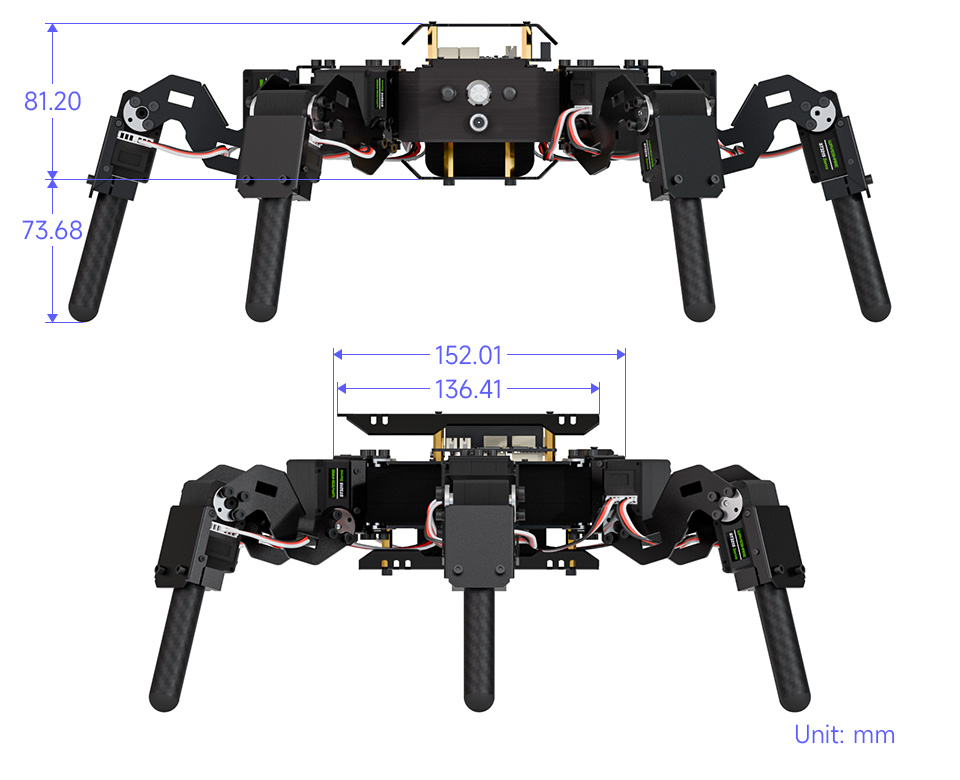
| 站立 (长 × 宽 × 高) |
344.30 × 428.59 × 154.88 (mm) |
| 自重 | 2.1kg |
| 自由度 | 整机 18,单腿 3 |
| 运动性能 | |
| 支持动作 | 三角步态、自平衡 |
| 行进载重 | 1kg |
| 舵机信息 | |
| 舵机尺寸 | 45.20 × 24.70 × 37.30 (mm) |
| 舵机重量 | 69g |
| 工作电压 | 12V |
| 空载速度 | 0.222sec / 60° (45RPM) |
| 堵转扭矩 | 30kg.cm |
| 额定负载 | 10kg.cm |
| 额定电流 | 900mA |
| 控制方式 | 数字信号 |
| 控制协议类型 | 半双工异步串行通信 |
| 供电参数 | |
| 电池 | 4000mAh (总容量) 18650 锂电池 × 6 |
| 充电方式 | DC 5.5*2.1 充电接口 |
| 续航时间 | 4.5h |
| 充电时间 | 3h |
| 其它 | |
| 板载主控 | ESP32-WROOM-32 |
| 板载主控模组特性 | Wi-Fi、BT、Dual Core、240MHz |
| 无线控制方式 | 2.4G Wi-Fi |
| 有线控制方式 | USB、UART |
| 人工操作方式 | Web 端控制界面 |
姿态自平衡
内置高精度 9 轴运动跟踪器 ICM20948,能够控制自身平衡
登录 Web 即可远程控制
不需要手动配置编译环境,开机自动建立 Wi-Fi 热点,
可使用手机或电脑浏览器连接并登录到控制页面,不需要额外下载 app

丰富的接口和外设
机身带 0.91 英寸 OLED 显示屏,
可使用 Web 端应用或上位机串口通信来改变显示内容

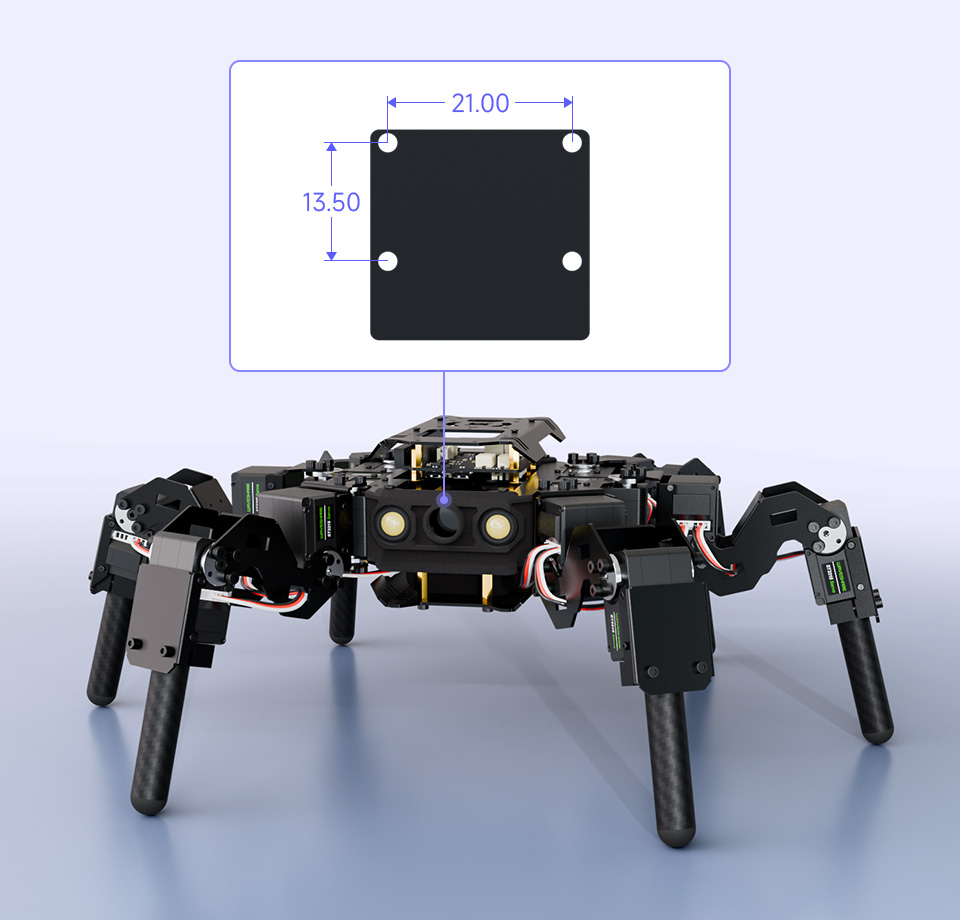
扩展视觉应用
预留摄像头孔位,用户可以根据对应孔位直接安装对应装配尺寸的摄像头
全面开源 支持二次开发
我们全面开放了 HexArth 系列的控制代码和通信接口文档,
基于我们提供的丰富示例,您可以使用多种语言和设备进行二次开发

高阶功能开发
可安装树莓派 4B / 树莓派 5 作为上位机通过串口与下位机通信,
ESP32 作为下位机可以分担大部分连杆逆解和步态生成的算力,
留给树莓派更多的资源用于高阶功能开发
多功能机器人驱动板
专为双脑架构类型的机器人设计的下位机,板载主控 ESP32 模组,可通过串口、http 请求和 ESP-NOW 等通信协议进行控制,下位机也包含了一个 Web
端界面用于机器人的一些基础控制。
ESP32 可负责承担机器人的底层计算,例如高频 PID 控制器控制车轮转速,高频的机械臂连杆逆解、位置插值计算、云台角度控制和 OLED 屏幕控制等工作。
ESP32 同时也负责读取各类传感器读数,例如 IMU (9 轴姿态传感器) 和
INA219 (电池电压检测),可以独立实现摄像头垂直稳定功能,有效为上位机节省计算资源和 IO 资源。
驱动板资源简介
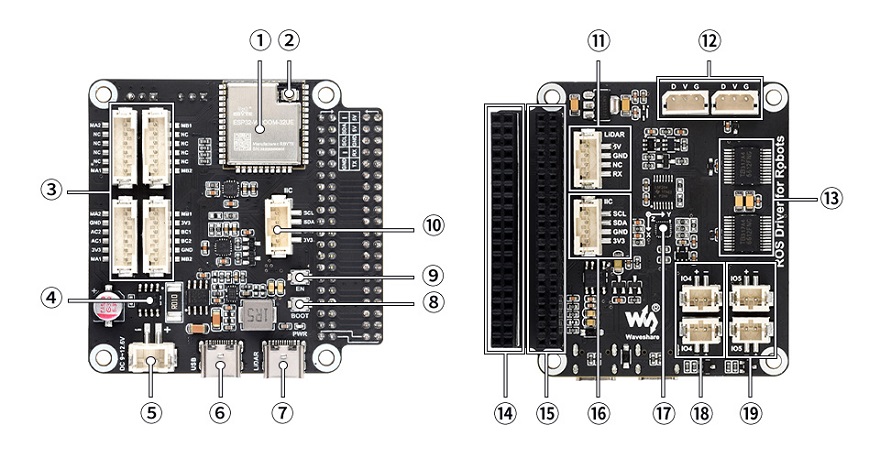
- 下位机主控模组 ESP32
- 下位机天线接口
- 电机控制接口
-
INA219
电池电压检测 IC
- 供电接口
- USB 通信/下载接口
- 雷达 USB 接口
- ESP32-IO0 按键
- ESP32-EN 按键
- I2C 设备接口
- 雷达串口接口
- 总线舵机控制接口
-
TB6612FNG
电机驱动 IC
- 上位机 40PIN 扩展接口
- 上位机连接接口
- I2C 设备接口
-
ICM20948
9 轴 IMU 姿态传感器
- 由 ESP32-IO4 控制的 12V 开关接口
- 由 ESP32-IO5 控制的 12V 开关接口
外形尺寸