BuildMecar-Kit
来自Waveshare Wiki
| ||||||||||||||||||||||||||
| ||||||||||||||||||||||||||

产品介绍
产品概述
- 智能小车一直以来都是作为电子爱好者的热衷项目。积木可以通过多种方式组装和连接来建造物体,包括车辆、建筑和工作机器人,构建的任何东西都可以再次拆开,并重新使用这些碎片来制造新的东西。
- 通过Raspberry Pi Build HAT,我们将两者进行融合,现在BuildMecar来了,通过Build HAT Python库可以轻松控制大部分LPF2接口的各种电机与传感器
产品特性
- Raspberry Pi Build HAT,可以轻松控制大部分LPF2接口的各种电机与传感器
- 采用积木构建主体,可以充分发货你的想象力,自由定制你的小车
- 采用高放电系数锂电池组,为BuildMecar提供强劲动力支持
- 采用麦克纳姆轮,可实现平移和原地旋转
- 可使用摄像头,让你的小车拥有眼睛
使用须知
- 安置摄像头,需要断电后再进行连接,否则可能导致摄像头损坏
- 如果你需要使用驱动电机时,Buildhat必须连接上我们提供的电池。
电机与麦克纳姆轮连接方式
| Buildhat端口 | 电机位置 | 麦克纳姆轮方向 |
| PORT A | 右后 | L |
| PORT B | 右前 | R |
| PORT C | 左后 | R |
| PORT D | 左前 | L |

- PS:
- 麦克纳姆轮方向,可以通过轮毅内侧的标识判断
- 如果没有按照该表安装,可能导致例程运行异常
系统烧录
- 这里强烈推荐使用本产品提供对应BuildMecar镜像,提取码:o72l
硬件要求
- 读卡器
- SD卡(8GB以上)
烧录步骤
- 这里以Windows电脑为例
- 将SD卡插入读卡器,并将插入电脑
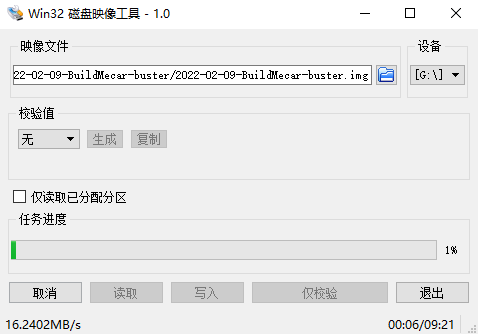
- 打开对应的烧录工具Win32 Disk Imager,后文资料中有提供对应的安装程序
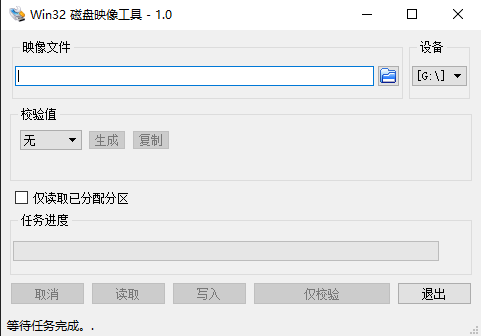
- 开打并选择对应的镜像
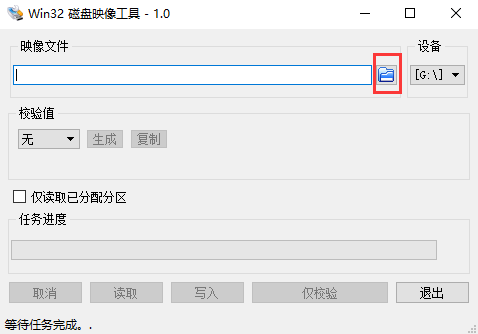
- 这里推荐使用本产品提供对应BuildMecar镜像,提取码:o72l
- 其基于树莓派2022-01-28-raspios-buster-armhf系统并已经配置完环境
- 可以让用户跳过环境配置的繁琐步骤,有助于用户快速上手
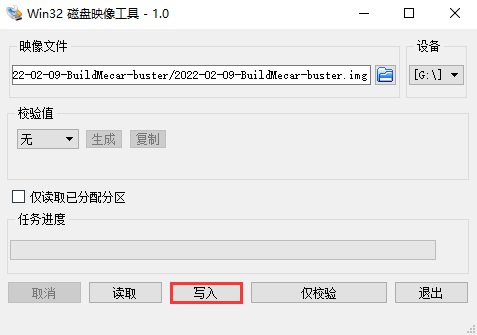
- 确认为读卡器的盘符

- 点击写入
- 软件会提示信息,选择Yes
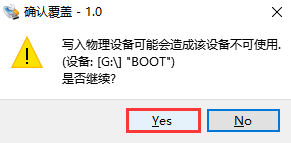
- 软件开始烧录镜像,等待即可
- 软件提示写入成功







配置WLAN(可选)
- 考虑到并非每个用户有显示屏和键盘给树莓派使用
- 在这里我们提供一个方法,可以通过读卡器配置WLAN无线网络
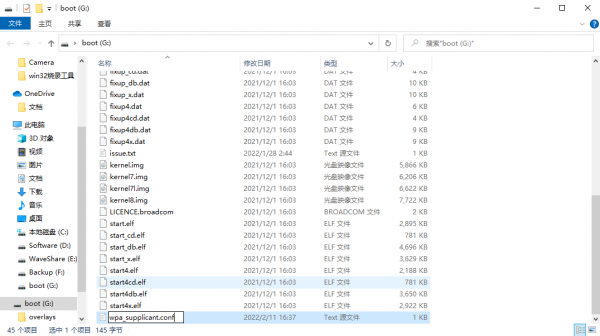
- 在 SD 卡上创建映像后,将其插入读卡器即可访问引导文件夹。
- 将某些文件添加到此文件夹将在 Raspberry Pi 首次启动时激活某些设置功能。
- 新建一个记事本文件

- 打开并输入对应内容
- 模板如下
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev country=<在此处插入 2 个字母 ISO 3166-1 国家代码> update_config=1 network={ ssid="<您的WLAN名称>" psk="<您的无线局域网密码>" }- 假设我在中国,无线名称test,无线密码密码为12345678

- 关闭记事本并保存
- 记事本重命名为wpa_supplicant.conf
- 将SD卡安全弹出,插上树莓派
- Raspberry Pi 连接到电源后,请确保等待几分钟(最多 5 分钟)以使其启动并在网络上注册。



配置SSH(可选)
- 我们的镜像已经默认开启了SSH,如果用户使用的是官方buster镜像需要自行开启SSH
- 开启方法如下:
- boot盘符下创建一个名为SSH文件夹即可
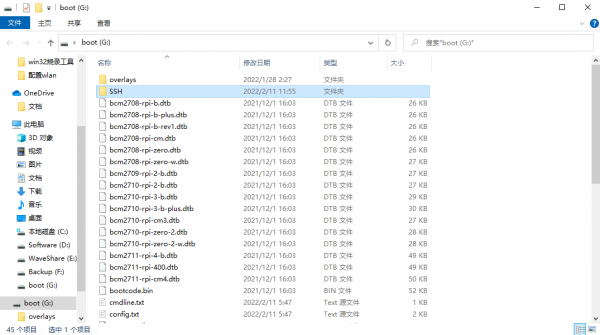
- boot盘符下创建一个名为SSH文件夹即可

登录
本地登录
- 如果你使用的是屏幕和键盘来控制树莓,只需要知道终端图标即可


远程登录
- 如果你想要使用远程登录树莓派则需要满足以下几个要求:
- 确保树莓派连接到网络,无论是通过WLAN或者网线
- 确保树莓派与你的电脑出于一个路由器下或同一网段
- 确保树莓派开启对应的远程登录功能
- 除这几个要求,如果你同一网段下存在多个树莓派在线,则你还需要获取你树莓派的IP地址
- 你可以通过一些局域网IP扫描工具,这里以Advanced IP Scanner为例程(若你没有多个树莓派在线或者使用我们提供的镜像则可以跳过这一步)
- 运行Advanced IP Scanner
- 点击Scan按钮,扫描当前局域网内的IP地址
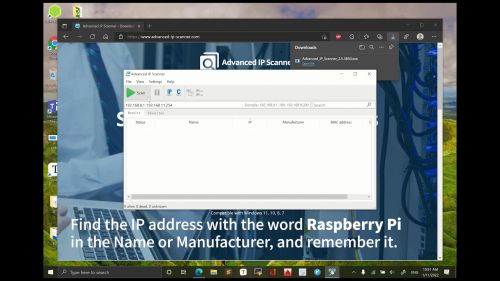
- 找到所有Manufacturer中有Raspberry Pi字样的IP地址并记录
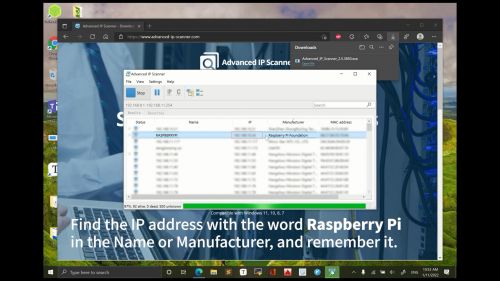
- 将设备上电,并确保设备连接上网络后
- 重新点击Scan按钮,扫描当前局域网内的IP地址
- 排除掉所有先前记录的Manufacturer中有Raspberry Pi字样的IP地址,剩下的就是你的树莓派IP地址了
- PS:
- 这是一个笨方法,但是对新手来说很有效和很友善,如果你需要更好的更快捷的方法需要你自己进行开发
- 如果使用我们提供的镜像Name,应为BuildMecar
- 你可以通过一些局域网IP扫描工具,这里以Advanced IP Scanner为例程(若你没有多个树莓派在线或者使用我们提供的镜像则可以跳过这一步)


SSH登录
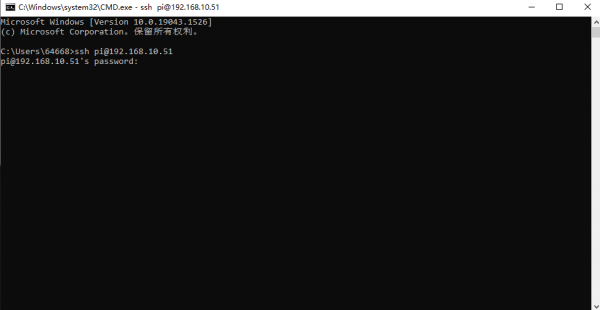
- 确保SSH功能开启,这里使用Windows自带的SSH登录指令
- 同时按win键和R键,输入cmd,回车,打开命令行

- 输入对应的指令,大致分为以下三种情况
- 若你使用的我们提供的镜像,使用以下指令
ssh pi@BuildMecar
- 若你使用的树莓派原生镜像且只有一个树莓派设备在线时,使用以下指令
ssh pi@raspberrypi
- 若你使用的树莓派原生镜像且多个树莓派设备在线时,请使用以下指令
ssh pi@IP地址
- 上文中已经描述了一种获取IP地址方法,这里就不赘述了
- 假设你获取到的地址为192.168.10.51,,指令就应为
ssh pi@192.168.10.51
- 若你使用的我们提供的镜像,使用以下指令
-
回车,输入树莓派的默认密码 raspberry
- PS:输入密码时屏幕上没有变化属于正常现象,密码输入完成后按回车键访问树莓派

- 这里SSH就登录成功了



环境配置
- 如果你烧录的镜像为我们提供的镜像,因为环境已经配置完成,则可以跳过这一章
开启串口
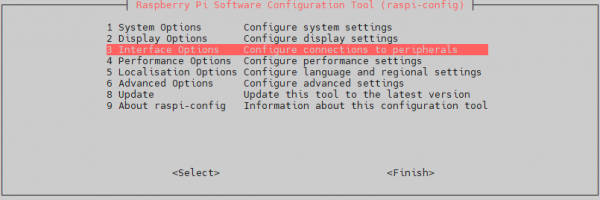
- 执行如下命令进入树莓派配置
sudo raspi-config
- 开启串口功能
- 选择Interfacing Options并进入
- 选择Serial Port
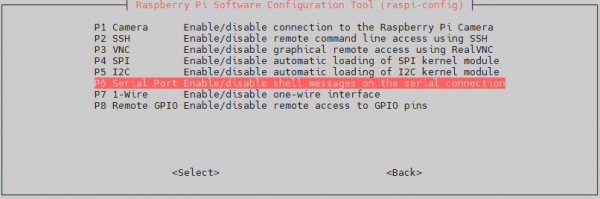
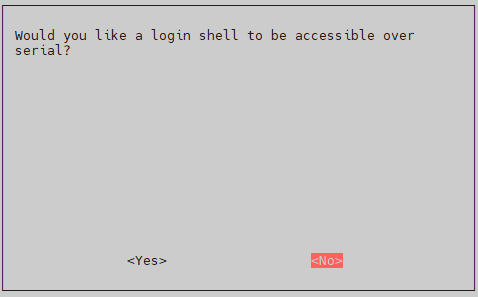
- 选择关闭串口调试功能
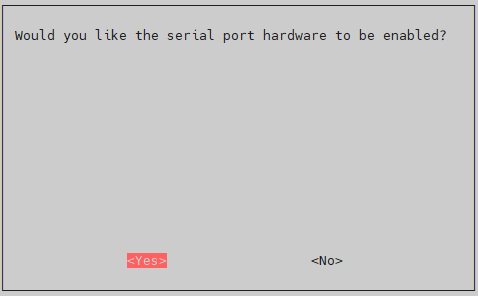
- 选择开启串口硬件
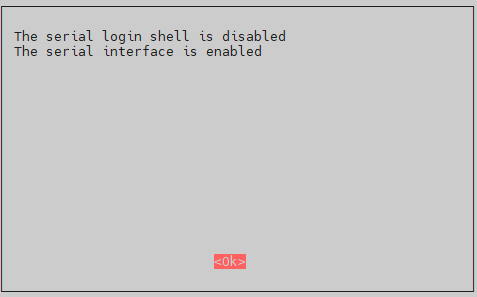
- 系统提示如下
- 选择Interfacing Options并进入





开启摄像头
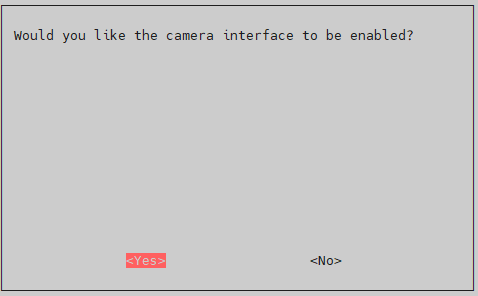
- 开启摄像头功能
- 延续上文继续操作,选择Camera

- 选择开启摄像头接口
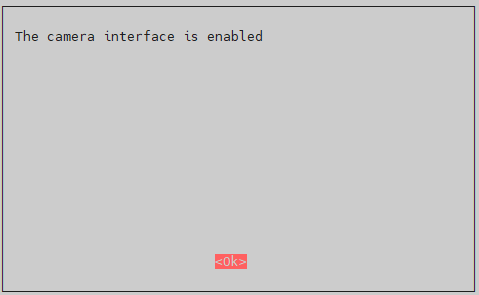
- 系统提示如下
- 回到主界面,选择Finish
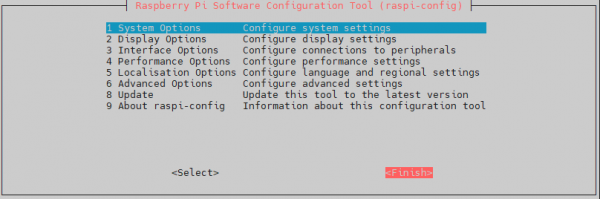
- 随后重启系统

- 延续上文继续操作,选择Camera





下载例程并安装对应库
cd ~ sudo apt-get install unzip -y wget https://www.waveshare.net/w/upload/a/ad/BuildMecar-code.zip unzip BuildMecar-code.zip sudo pip3 install -r ~/BuildMecar-code/requirements.txt wget https://www.waveshare.net/w/upload/9/91/Python-build-hat.zip unzip Python-build-hat.zip cd python-build-hat/ chmod +x ./* sudo pip3 install . --user sudo ./build.sh
例程讲解
- 本章基于已经登录树莓派终端
- 树莓派启动后第一次运行例程时,需要将固件复制到板上时会有几秒钟的暂停
- 您应该看到Buildhat上的红色 LED 熄灭,绿色 LED 亮起
- Python 程序的后续执行将不需要此暂停
001-MotorRotation
硬件要求
- Buildhat上连接好电池
- Buildhat连接到树莓派上
- Buildhat的PORT A上连接
使用步骤
- 输入一下指令运行例程
sudo python3 ~/BuildMecar-code/001-MotorRotation/MotorRotation.py
例程效果
- 连接到Buildhat PORT A上的电机转动1秒后停止
- PS:因为这里使用的驱动PWM并不高,如果电机不转动,请悬空电机再测试
002-MotorSpeedControl
硬件要求
- Buildhat上连接好电池
- Buildhat连接到树莓派上
- Buildhat的PORT A上连接
使用步骤
- 输入一下指令运行例程
sudo python3 ~/BuildMecar-code/002-MotorSpeedControl/MotorSpeedControl.py
例程效果
- 连接到Buildhat PORT A上的电机逐渐加速至最大速度
- 随后电机逐渐减速直至停止
- 改变电机转动方向,重复加速和减速
003-MultipleMotors
硬件要求
- Buildhat上连接好电池
- Buildhat连接到树莓派上
- Buildhat的PORT A、B、C、D上各种连接上四个电机
使用步骤
- 输入一下指令运行例程
sudo python3 ~/BuildMecar-code/003-MultipleMotors/MultipleMotors.py
例程效果
- 连接到Buildhat PORT A上的电机逐渐加速至最大速度
- 随后电机逐渐减速直至停止
- 改变电机转动方向,重复加速和减速
004-WebControl
使用步骤
- 输入一下指令运行例程
sudo python3 ~/BuildMecar-code/004-WebControl/WebControl.py
例程效果
- 运行后,终端会输出你的IP地址
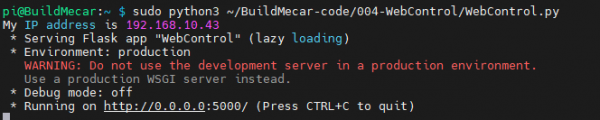
- 在浏览器中输入输入你的IP地址:5000,这里以192.168.10.43为例

- 依次按下BUTTON_1和BUTTON_2,可以看到树莓派终端显示按键按下和释放的提示


005-CameraStreamer
硬件要求
- 树莓派连接上摄像头
使用步骤
- 输入一下指令运行例程
sudo python3 ~/BuildMecar-code/005-CameraStreamer/CameraStreamer.py
例程效果
- 运行后,终端会输出你的IP地址
- 在浏览器中输入输入你的IP地址:5000,这里以192.168.10.43为例
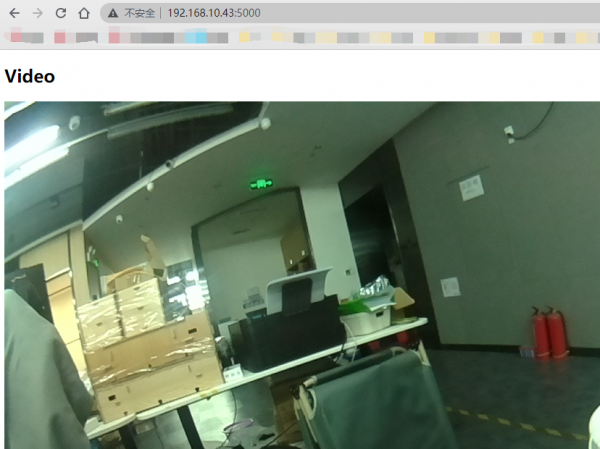
- 这可以看到摄像头采集的画面被推流到网页上面

006-Example
硬件要求
- BuildMecar组装完成并按照上文的连接方式
- 树莓派连接上摄像头(可选)
使用步骤
- 输入一下指令运行例程
sudo python3 ~/BuildMecar-code/006-Example/Example.py
例程效果
- 运行后,终端会输出你的IP地址
- 在浏览器中输入输入你的IP地址:5000,这里以192.168.10.43为例
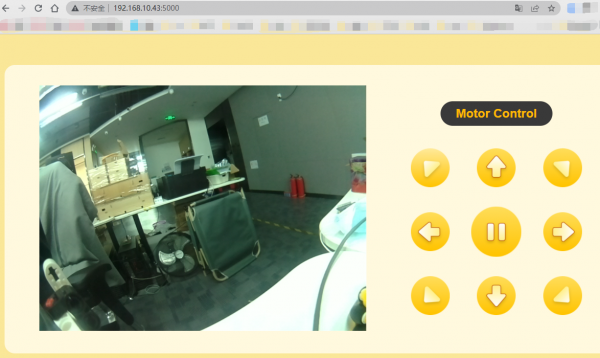
- 通过方向按钮,可以控制BuildMecar的行进方向
- 若安装摄像头,例程会自动识别并将画面显示网页中

FAQ
售后
联系人:林工
EMAIL:3005425717@qq.com
电话:0755-83043099
QQ:3005425717
微信:扫下方二维码添加

说明:进行售后服务前,请准备好客户信息(定货单位、定货人等),以供验证