RoArm-M2
4-DOF 大扭矩总线舵机机械臂
支持灵活扩展和二次开发
![RoArm-M2-S 四自由度机械臂主图]()
![RoArm-M2-S 四自由度机械臂特性简介]()
产品介绍
RoArm-M2 系列是一款专为创新应用而设计的四自由度智能机械臂。采用轻量化结构,机身不到 900g,有效负载 0.5kg@0.5m,可灵活安装在各类移动平台。360° 全方位的底座运动范围配合三个灵活的关节,构建直径 1m 的触手可及工作空间。
关节直驱设计在提高定位精度的同时也提高了结构可靠性,创新双驱技术使肩关节力矩成倍增强。主控模组使用 ESP32 MCU,支持多种无线控制方式,提供控制接口与丰富的通讯协议,可轻松连接至多种常用设备。
人性化的可跨平台 Web 应用和简洁直观的坐标控制模式,大幅降低使用难度。丰富的图文与视频教程助您快速上手学习和使用,兼容 ROS2 和多种上位机,支持多种无线和有线通信方式。标配可扩展组件模块,支持自定义打造多功能末端,满足创新应用需求。
RoArm-M2 系列在轻量化、易用性、扩展性和开放创新等多个维度实现出色平衡,是一款集智能控制、人机交互和可定制开发于一体的多功能机械臂。如果您需要一个兼具灵活性、可扩展性和易用性的解决方案,RoArm-M2 系列将是很好的选择。
版本选择
新增的 RoArm-M2-Pro 升级为全金属 ST3235 总线舵机,机身更坚固,
散热性能增强,提升产品的耐久性
![RoArm-M2-S 四自由度机械臂主要参数]()
参数对比
![RoArm-M2-S 四自由度机械臂主要参数]()
多功能末端执行器可切换
![RoArm-M2-S 四自由度机械臂]()
末端执行器支持多种安装方式,可作为夹头也可以作为第四个自由度,
并开源 DXF 和三维模型,便于用户进行 DIY 和二次开发
![RoArm-M2-S 四自由度机械臂多功能末端执行器可切换]()
关节动作灵活 × 全向工作空间
![RoArm-M2-S 四自由度机械臂]()
360° 旋转的底座配合灵活的关节运动,打造直径 1m 全向触手可及的操作空间,让机械臂全方位运动自如
![RoArm-M2-S 四自由度机械臂关节动作灵活×全向工作空间]()
简单易用
跨平台 Web App 控制
![RoArm-M2-S 四自由度机械臂]()
无需下载安装,输入地址即可访问控制。我们开发的 Web App 让用户可以通过手机、平板、电脑无缝连接和控制 RoArm-M2,点击屏幕按键即可操控,用户也可以通过修改完全开源的代码来自定义界面和增加自己的功能
![RoArm-M2-S 四自由度机械臂简单易用 跨平台 Web App 控制]()
全面开源 支持二次开发
![RoArm-M2-S 四自由度机械臂]()
我们全面开放了 RoArm-M2 系列的控制代码和通信接口文档,基于我们提供的丰富示例,您可以使用多种语言和设备进行二次开发;同时我们也提供模块化的例程和教程课程,方便零基础用户学习
![RoArm-M2-S 四自由度机械臂全面开源,支持二次开发]()
轻量化机身 重任绰绰有余
![RoArm-M2-S 四自由度机械臂]()
不到 900g 的轻盈机身,采用了碳纤维和 5052 铝合金,
保证了重载荷时的稳定性,适用于各种移动平台
![RoArm-M2-S 四自由度机械臂轻量化机身 重任绰绰有余]()
关节直驱设计
反馈精度可达 0.088°
![RoArm-M2-S 四自由度机械臂]()
关节角度反馈不经过任何减速组,直接使用 12 位高精度磁编码器来获取关节角度,精度更高,可通过关节反馈的角度来计算当前目标点的实际位置
![RoArm-M2-S 四自由度机械臂关节直驱设置 反馈精度可达 0.088°]()
创新双驱技术
肩关节扭矩成倍增强
![RoArm-M2-S 四自由度机械臂]()
我们开发的双驱控制算法,让肩关节的两个舵机能够高度协调输出力矩,
实现动力暴增,大幅提升 RoArm-M2 系列的整体负载能力
![RoArm-M2-S 四自由度机械臂创新双驱技术 肩关节扭矩成倍增强]()
直驱夹爪 实现精细力控
![RoArm-M2-S 四自由度机械臂]()
直驱夹爪设计允许在程序中细致控制夹取力度,
适用于夹取不能被大力挤压物品的场景
![RoArm-M2-S 四自由度机械臂直驱夹爪 实现精细力控]()
可加装橡皮筋助力
用于补偿重力影响
![RoArm-M2-S 四自由度机械臂]()
SHOULDER 和 ELBOW 关节支持加装橡皮筋来为机械臂助力,
利用橡皮筋收缩的弹力来补偿重力影响,增加机械臂的有效载荷
![RoArm-M2-S 四自由度机械臂可加装橡皮筋助力 用于补偿重力影响]()
动态外力适应控制
![RoArm-M2-S 四自由度机械臂]()
开启该功能后,可以限制每个关节的扭矩,当受到的外力大于关节扭矩阈值时 (阈值可以设置大小),机械臂会随外力转动,当外力减小到低于扭矩阈值时机械臂会恢复到指定位置
![RoArm-M2-S 四自由度机械臂动态外力适应控制]()
一键自动记录
便捷创建动作
![RoArm-M2-S 四自由度机械臂]()
RoArm-M2 系列可以将用于机器人控制的 JSON 指令保存为任务文件,任务文件保存在 ESP32 的 Flash 中,掉电不会丢失,机械臂可以通过调用这些任务文件来执行复杂的重复操作
![RoArm-M2-S 四自由度机械臂一键自动记录 便捷创建动作]()
简单坐标输入
准确抵达目标
![RoArm-M2-S 四自由度机械臂]()
我们开源了在三维直角坐标系中的逆运动学控制算法:通过输入目标位置,逆运动学函数会计算出每个关节需要转动的角度,即可准确抵达目标点位
![RoArm-M2-S 四自由度机械臂简单坐标输入 准确抵达目标]()
柔和曲线运动
动作更流畅
![RoArm-M2-S 四自由度机械臂]()
我们使用了曲线速度平滑控制算法,使机械臂运动更加柔和自然,
启动和停止无震荡
![RoArm-M2-S 四自由度机械臂柔和曲线运动 动作更流畅]()
ESP-NOW 无线控制
低延迟远程协作
![RoArm-M2-S 四自由度机械臂]()
ESP-NOW 是一种低延迟、不依赖网络基础设施的自组网无线通信协议,您可以使用一台机械臂来无线控制其它机械臂,控制方式可以为广播控制、组播控制和单播控制
![RoArm-M2-S 四自由度机械臂 ESP-NOW 无线控制 低延迟远程协作]()
*注:广播控制不限制被控制设备的数量,组播控制被控制设备数量至多 20 台,具体可参考 WIKI
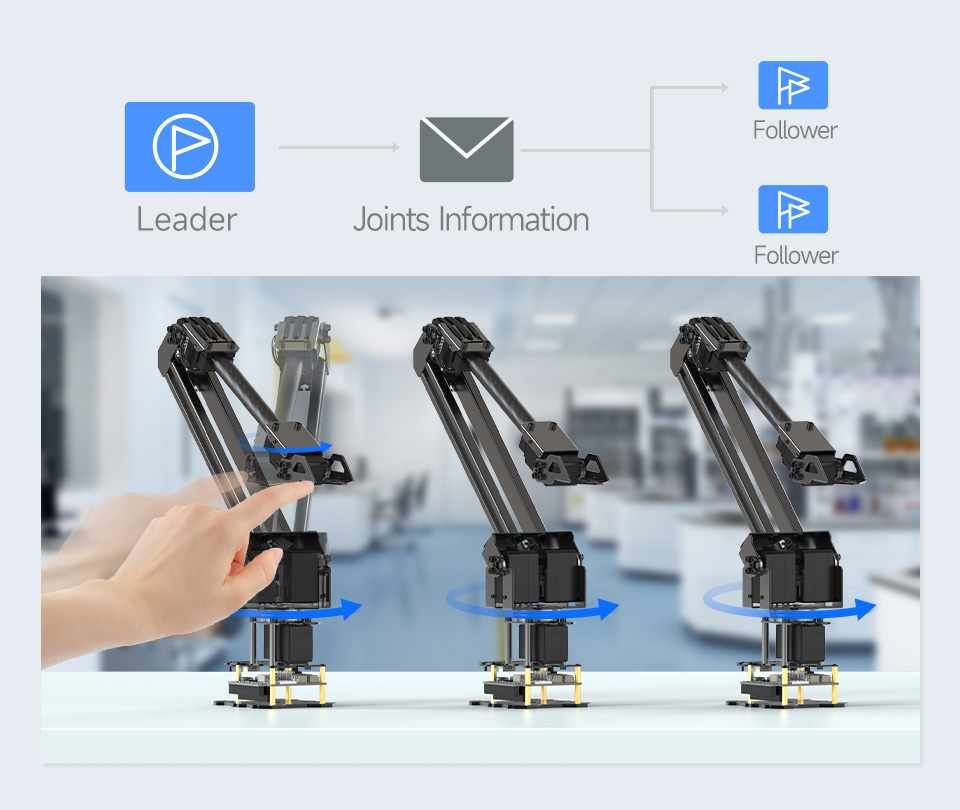
基于 ESP-NOW 的模仿模式
实时发布动作指令
![RoArm-M2-S 四自由度机械臂]()
在模仿模式下,作为 Leader 的机械臂会将自己的关节角度通过 ESP-NOW 发送给其它机械臂,其它机械臂处于 ESP-NOW 的 Follower 模式时,会实时模仿 Leader,做出相同的动作
![RoArm-M2-S 四自由度机械臂基于 ESP-NOW 的模仿模式 实时发布动作指令]()
开放控制接口
支持多种设备与语言
![RoArm-M2-S 四自由度机械臂]()
RoArm-M2 系列不仅可以使用 Web 应用来控制机械臂,同时也支持使用其它设备通过 HTTP 协议的网络请求、串口通信或 USB 线连接的方式将 JSON 格式的指令发送给 RoArm-M2,进行操控并获取反馈信息
![RoArm-M2-S 四自由度机械臂开放控制接口 支持多种设备与语言]()
多样安装选择
融入您的应用
![RoArm-M2-S 四自由度机械臂]()
RoArm-M2 系列提供多种安装方案及相关二次开发资料,可灵活适配不同使用场景,融入您的项目和应用中
![RoArm-M2-S 四自由度机械臂多种安装选择 融入您的应用]()
标准扩展接口
轻松定制升级
![RoArm-M2-S 四自由度机械臂]()
RoArm-M2 系列的大臂主体结构由两根 1020 欧标铝型材导轨组成,可使用船型螺母安装其它外设以适配不同的需求,我们在配件包中附赠了 M4 螺丝和对应的船型螺母,使用简单方便,助您轻松定制
![RoArm-M2-S 四自由度机械臂标准扩展接口 轻松定制升级]()
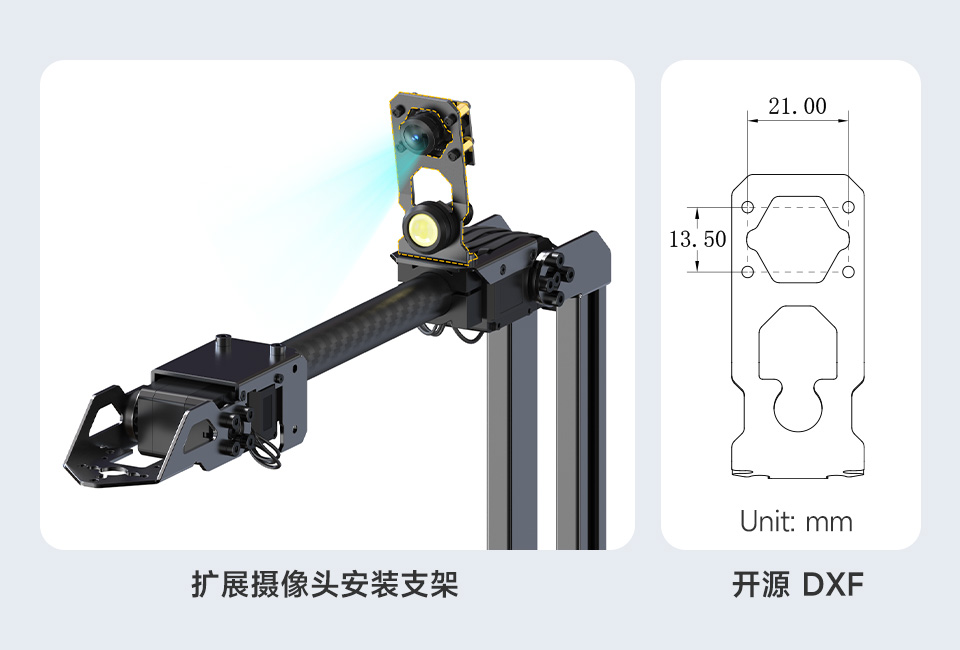
支持安装摄像头
扩展视觉应用
![RoArm-M2-S 四自由度机械臂]()
RoArm-M2 系列随产品附赠了摄像头安装支架,并开源了相关图纸,您可以在这个支架上面直接安装对应装配尺寸的摄像头,也可以通过转接的方式来安装其它规格的摄像头
![RoArm-M2-S 四自由度机械臂支持安装摄像头 扩展视觉应用]()
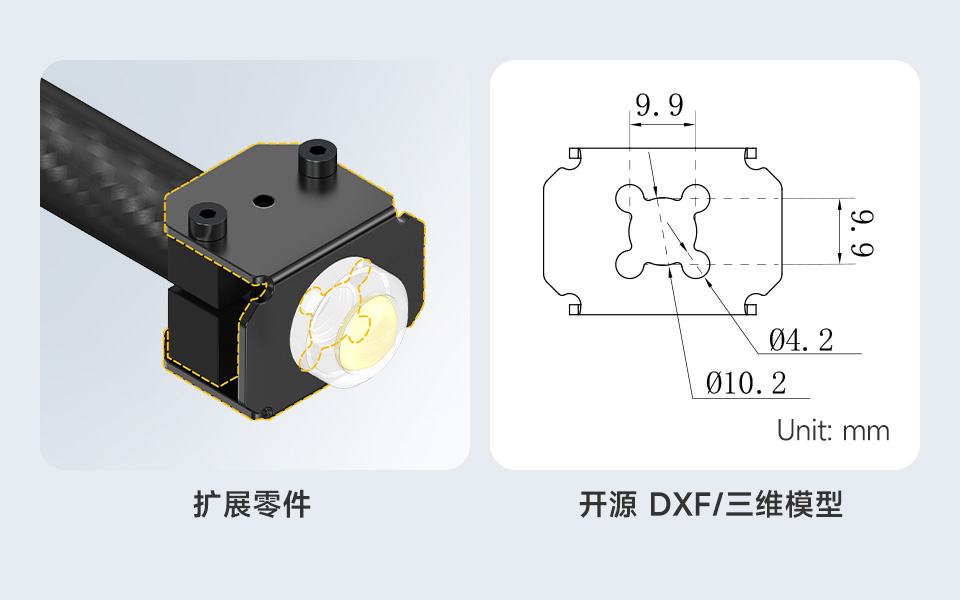
支持扩展多种末端执行器
打造多功能 EoAT
![RoArm-M2-S 四自由度机械臂]()
RoArm-M2 系列随产品配有一个末端执行器扩展零件,支持扩展和替换多种末端执行器,方便用户开发定制多功能 EoAT (End of Arm Toolings 机械臂末端执行器)
![RoArm-M2-S 四自由度机械臂支持扩展多种末端执行器 打造多功能 EoAt]()
物联网业界杰出的
ESP32 控制核心
![RoArm-M2-S 四自由度机械臂]()
采用 ESP32 强大的主控 MCU,支持多种无线通信协议,
拥有海量开源资源,助力二次开发创新应用
![RoArm-M2-S 四自由度机械臂物联网界杰出的 ESP32 控制核心]()
兼容 ROS2
助力模型建立和多机协作
![RoArm-M2-S 四自由度机械臂]()
提供 ROS2 的通信节点、URDF 模型描述文件和 ROS2 的零基础教程
![RoArm-M2-S 四自由度机械臂兼容 ROS2 助力模型建立和多机协作]()
丰富教程资源
助力二次开发
![RoArm-M2-S 四自由度机械臂]()
我们提供完善的单元教程和案例,涵盖各项功能和常见应用场景,
助力用户快速上手使用,方便用户进行二次开发
![RoArm-M2-S 四自由度机械臂丰富教程资源 助力二次开发]()
通用驱动板
资源丰富支持创新
![RoArm-M2-S 四自由度机械臂]()
采用通用驱动板,提供丰富接口与资源,支持用户创新开发和功能扩展
![RoArm-M2-S 四自由度机械臂通用驱动板 资源丰富支持创新]()
- ESP32-WROOM-32 主控模组
可使用 Arduino IDE 进行开发
- IPEX 一代 WiFi 接口
用于连接 WiFi 天线增加无线通信距离
- 激光雷达接口
集成了雷达转接板的功能
- I2C 外设扩展接口
可用于连接 OLED 屏幕或其它 I2C 传感器
- 复位按键
按下后松开,ESP32 会重启
- 下载按键
按下时开机,ESP32 会进入到下载模式
- DC-DC 5V 稳压电路
可为上位机例如树莓派或 Jetson nano 等供电
- Type-C 接口 (LADAR)
激光雷达数据接口
- Type-C 接口 (USB)
ESP32 串口通信接口、可为 ESP32 上传程序
- XH2.54 供电接口
输入 DC 7~13V,该接口直接为总线舵机和电机供电
- INA219
电压电流监测芯片
- 开关
控制外部供电的开关
- ST 系列总线舵机接口
用于连接 ST3215、ST3235 等总线舵机
- 电机接口 PH2.0 6P
B 组带编码器的电机接口
- 电机接口 PH2.0 6P
A 组带编码器的电机接口
- 电机接口 PH2.0 2P
A 组无编码器的电机接口
- 电机接口 PH2.0 2P
B 组无编码器的电机接口
- AK09918C
3 轴电子罗盘
- QMI8658C
6 轴运动传感器
- TB6612FNG
电机控制芯片
- 总线舵机控制电路
可用于扩展多个 ST3215 总线舵机,并获取舵机反馈
- SD 卡槽
可用于存储日志或 WiFi 配置
- 40PIN 上位机接口
方便接入树莓派或 RDK X3
- 40PIN 扩展接口
方便使用树莓派或 RDK X3 的引脚
- CP2102
串口转 USB,用于雷达数据传输
- CP2102
串口转 USB,用于 ESP32 串口通信
- 自动下载电路
为 ESP32 上传程序时不需要按 EN 和 BOOT 按键
多元化板载资源
支持功能扩展
![RoArm-M2-S 四自由度机械臂]()
集成 TB6612FNG 电机驱动 IC、INA219 电池电压检测和 9 轴 IMU
传感器,支持功能扩展创新
![RoArm-M2-S 四自由度机械臂多元化板载资源 支持功能扩展]()
![RoArm-M2-S 四自由度机械臂 WiFi/OLED 屏/LED 补光]()
鼠标拖拽交互
![RoArm-M2-S 四自由度机械臂]()
控制更加灵活,您可以设置鼠标按下和抬起时的动作指令,我们提供了 Web 端应用和桌面端软件 (使用 Python 开发的开源程序) 来实现这一操作
![RoArm-M2-S 四自由度机械臂鼠标拖拽交互]()
产品详细参数
| 自由度数量 |
4 |
| 工作空间 |
水平直径 1090mm (Max,360° 全向),垂直范围 798mm (Max) |
| 工作电压 |
标配 12V 5A 电源,可使用 3S 锂电池组供电 |
| 载荷能力 |
0.5kg@0.5m |
| 单向重复定位精度 |
≈±4mm (相同负载) |
| 驱动器旋转速度 |
40rpm (空载,无扭矩限制) |
| 工作范围 |
BASE-360°、SHOULDER-180°、ELBOW-180°、HAND-135°/270° |
| 驱动方式 |
TTL 总线伺服舵机 (TTL BUS SERVO),关节直驱 |
| 驱动器数量 |
5 |
| 关节角度传感器 |
12 位 360° 磁编码器 |
| 驱动器堵转扭矩 |
30KG.CM @12V |
| 关节反馈信息 |
驱动器状态、关节角度、旋转速度、关节负载、驱动器电压、驱动器电流、驱动器温度、驱动器工作模式 |
| 板载主控 |
ESP32-WROOM-32 |
| 板载主控模组特性 |
WiFi, BT, Dual Core, 240MHz |
| 无线控制方式 |
2.4G-WiFi、ESP-NOW |
| 有线控制方式 |
USB、UART |
| 人工操作方式 |
WEB 端控制界面 |
| 机器操作方式 |
使用 UART/USB/ESP-NOW*/HTTP 通信 JSON 数据格式的指令
(*目前例程中 ESP-NOW 的 JSON 指令交互没有反馈信息) |
| 可连接上位机 |
树莓派、Jetson Orin Nano、PC 等支持 USB 连接的设备 |
| 末端执行器功能 |
默认为夹头功能,可将夹头改为一个额外的自由度 |
| LED 补光灯功率 |
小于 1.5W |
| OLED 屏幕尺寸 |
0.91inch |
| 板载其它功能 |
两路 12V 开关、9-DOF IMU |
| 机械臂质量 |
RoArm-M2-S:826 ± 15g (不包括桌边固定夹)
RoArm-M2-Pro:873.3 ± 15g (不包括桌边固定夹) |
| 桌边固定夹质量 |
290 ± 10g |
| 桌边固定夹支持的桌边厚度 |
<72mm |
| 机械臂例程功能 |
三维直角坐标系控制 (逆运动学控制)、动态外力适应控制、关节角度控制、工作信息反馈、FLASH 文件系统操作、步骤录制和播放、ESP-NOW 控制、模仿模式 (拖拽示教)、LED 灯光控制、板载 12V 开关控制、WiFi 相关功能设置、设置开机任务、总线舵机相关功能设置、反馈模式设置、末端组装方式设置等功能。注意:此处仅为概括介绍,开源例程的具体功能和相关指令可参考 WIKI。 |
产品及包装展示
![RoArm-M2-S 四自由度机械臂产品及包装展示]()
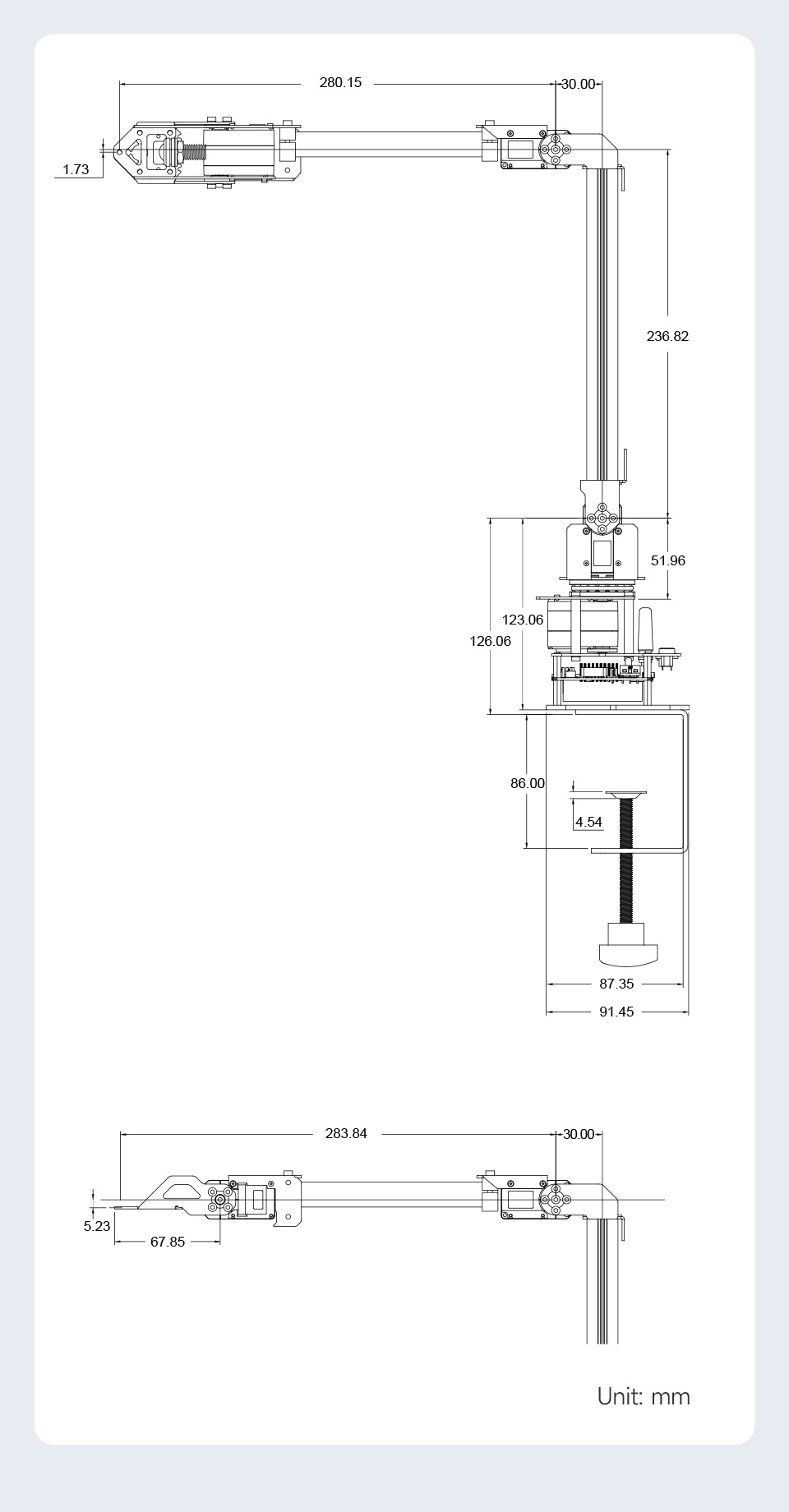
产品尺寸
![RoArm-M2-S 四自由度机械臂产品尺寸]()