Cobra Flex
通用模块化线控底盘
四轮四驱紧凑型差速底盘,助力多场景智能应用


技术参数
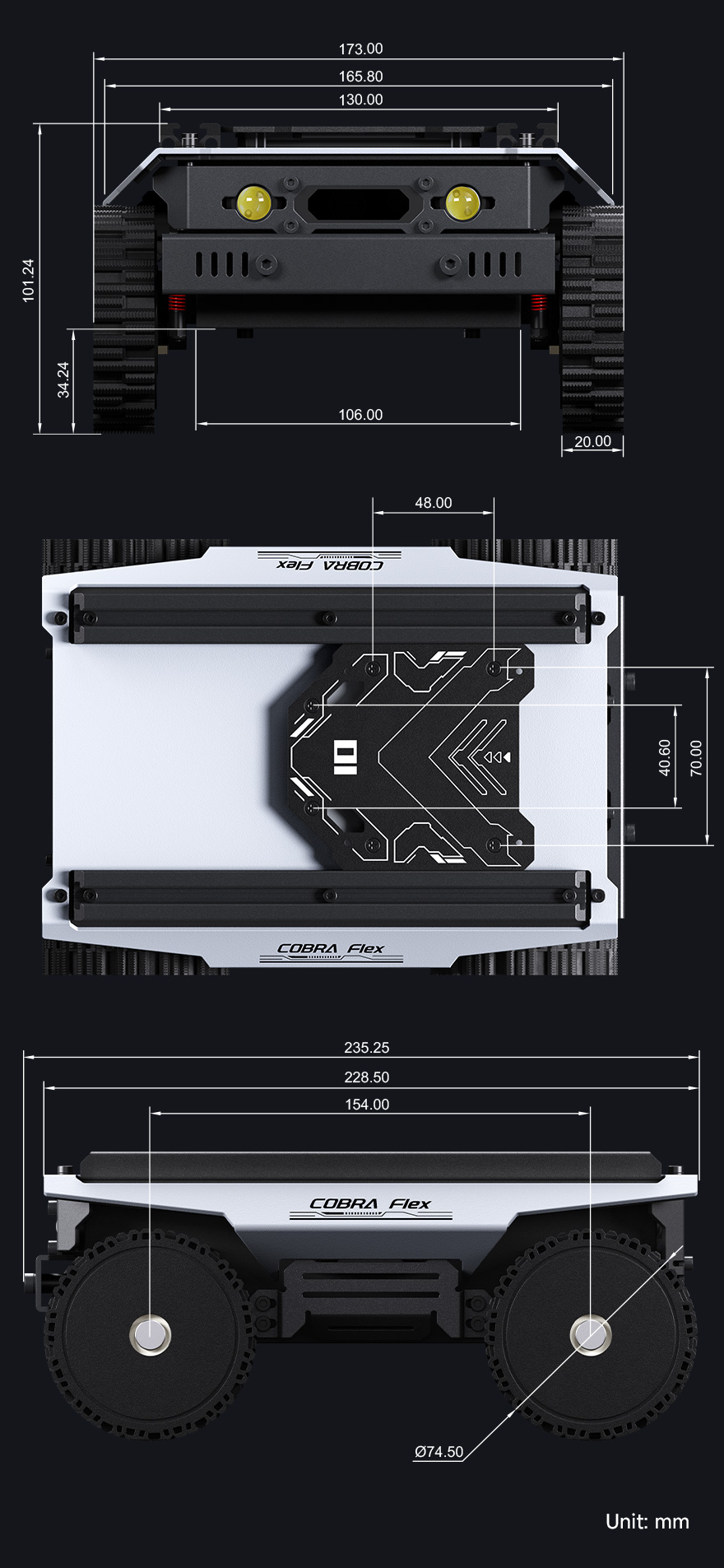
| 尺寸 (mm) | 235.25 × 173 × 101.24 |
|---|---|
| 底盘重量 | 2375±5g |
| 转向方式 | 差速转向 |
| 驱动轮数量 | 4 |
| 悬挂 | 四轮独立悬挂 |
| 离地间隙 | 34.24mm |
| 电机空载速度 | 180rpm@12V (受电压影响) |
| 轴距 | 154mm |
| 驱动轮直径 | 74.5mm |
| 电池 | 5000mAh (总容量) 18650 锂电池 × 6 |
| 充电方式 | DC 5.5*2.1 充电接口 |
| 对外供电 | 电池直供 |
| 扩展导轨 | 间距 110mm,1020 铝型材 |
| 最大运行速度 | 0.53m/s@12V (受电压影响) |
| 行进载重 | 12KG |
| 充电时间 | 3h |
| 全功率运行时间 | 10h |
| 最大爬坡角度 | 30° |
| 最小转弯半径 | 0m (原地自旋受载荷及地面摩擦条件影响) |
| 底盘与上位机通信协议 | USB / UART / HTTP |
| 底盘与轮毂电机通信协议 | LIN 总线 |
| 底盘与总线舵机通信协议 | TTL / RS485 |
| 防护等级 | IP32 |
| 工作温度 | 0°C~40°C |
产品介绍
Cobra Flex 是一款通用模块化线控底盘,具备强悍的越野通过能力和抗震性能,开源全部代码,方便用户用于二次开发。需要扩展多种上位机 (树莓派、Jetson Orin Nano 等),并可通过 USB 或串口与底盘通信。四轮由内置 FOC 控制电路的总线轮毂电机驱动,动力强劲,转速平稳。内部安装了由六颗 18650 锂电池 (3s2p) 组成的电池组,为机器人持续供电的同时支持边充电边放电。内置多功能机器人驱动板,采用强弱电分离设计,可扩展总线舵机,驱动板基于 ESP32,板载 Wi-Fi (仅用于短距离调试) 和蓝牙。采用 CNC 工艺的紧凑型四轮独立悬挂,使其轻松满足重载、避震和越野等需求。产品配有两条 1020 欧标型材扩展导轨,为二次开发提供了更多的可行性。
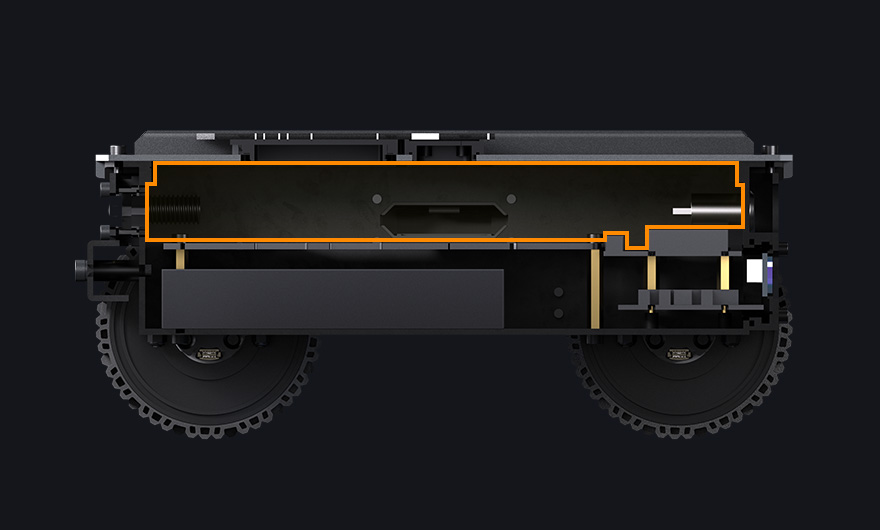
全金属紧凑型车身
兼顾大空间
得益于紧凑的独立悬挂结构和轮毂电机,机器人内部空间的利用率得以充分提升,车身内部安装了由六颗 18650 锂电池 (3s2p) 组成的电池组,在保证续航的同时,也有足够的剩余空间在底盘内部安装树莓派、Jetson Orin 系列上位机以及摄像头模块,用户也可以根据实际需求,自由规划这些空间的用途。

具备出色的抗震性能
每个轮毂电机都配有一个单独的 CNC 金属悬挂,
结构简单可靠,抗震性能更出色

内部支持安装多种上位机
支持安装树莓派或 Jetson Orin 系列单板电脑作为上位机,
上位机可直接安装在内部,无需额外增加模块化上装组件,
上位机可通过 USB 接口或 UART 与底盘通信,
可控制底盘移动并获取底盘状态的实时信息反馈

安装 Jetson Orin 系列上位机

安装树莓派系列上位机
1020 标准铝型材导轨
可在导轨上安装各类外设以及模块化上装,助力开发者高效二次开发

其他实用设计


可直接控制多种总线舵机
底盘可连接 RSBL 系列和 ST / SC 系列总线舵机
(需匹配舵机供电电压)

丰富的开源例程

产品展示

产品尺寸