ZED-F9P GPS-RTK HAT
| |||||||||||||||||
| |||||||||||||||||

说明
产品简介
本产品是一款基于 ZED-F9P 的树莓派高精度厘米级 GNSS 定位扩展板,具有快速收敛时间的多频段 RTK 定位和高更新率等特性,支持 Moving base RTK 模式;可并发接收 4 种 GNSS;支持定位增强系统,具有定位精准、快速、漂移小,防欺骗和抗干扰性强等优点。既适用于组建连续运行参考站CORS(Continuous Operational Reference System),也适用于需要高精度定位的设备。
产品参数
- 接收信号: GPS ,SBAS,QZSS,GLONASS,BeiDou,Galileo
- 支持SBAS: WAAS, EGNOS, MSAS, GAGAN
- 信号频段: GPS L1C/A L2C,SBAS,QZSS ,GLONASS L1OF L2OF,BeiDou B1I B2I,Galileo E1B/C E5b
- 捕获时间: 冷启动:24S(最快);热启动:2S
- 捕获灵敏度: -148dBm
- 跟踪灵敏度: -167dBm
- 重捕捕获灵敏度: -160dBm
- 定位精度: <1.5m CEP(PVT),0.01m+1ppm CEP(RTK)
- 最高海拔: 50000(M)
- 最大速度: 500m/s
- 逻辑电压: 3.3/5V
- 通信接口: UART,SPI,I2C,USB
- 串口通信波特率: 4800~921600bps (默认9600)
- 更新速率: 最大 25Hz@RTK,GPS模式(默认 1HZ)
- 通信协议: NMEA 0183 Version 4.10,UBX,RTCM 3.3
- 工作电压: 5V(由5V 引脚输入电源)
- 整机耗流: 小于 120mA@5V (Continue 模式)
- 工作温度: -40℃ ~ 85℃
- 产品尺寸: 65mm × 30.5mm
引脚分布

定位原理
什么是GNSS?
GNSS全称Global Navigation Satellite System(全球导航卫星系统) , 是多个卫星系统的总称 , 目前世界上有BDS(中国) , GLONASS(俄罗斯) , GPS(美国) , Galileo(欧洲) , QZSS(日本) , IRNSS(印度)导航卫星系统 , GNSS特性如下:
- GPS系统是现阶段应用较为广泛 , 技术较成熟的卫星定位技术 . 相继发展出L1C/A , L2C , L5等频段信号提高了定位精度 .
- 多系统多频段GNSS模组能够捕获来自不同卫星系统的卫星 , 使得有效卫星数大幅度提升 , 提高定位精度和稳定性 .
- GNSS模组接收到的信号包含反射和折射信号 , 产生多路径效应影响定位精度 , 多频段多星座系统技术可以有效抑制削弱大气层误差 , 提高定位精度 .
- 随着GNSS发展 , 出现了多种定位技术如RTK , PPP-RTK和多传感融合定位DR(Dead Reckoning 航位推测法)等 , 满足差异化高精度定位需求 .
GPS工作原理
本小节简述GPS接收机定位的工作原理如下图所示 细节描述如下5点 . 定位原理详情请参考GPS定位基本原理 GPS工作原理 , Fundamentals of gps receivers , FUNDAMENTALS OF GPS
- GPS卫星在空中连续发送带有自身时间和位置信息的无线电信号 , 供GPS接收机(GNSS模组如ZED-F9P)接收
- 卫星和接收机内部会产生伪随机码 , 一旦两个伪随机码实现同步 , 接收机便能测定无线电信号发射时间与到达接收机的时间之差(简称时延) , 将时延乘上光速便得到距离(简称伪距)
- GPS系统时间是由每颗卫星上原子钟的铷原子频标保持的 . 这些星钟一般来讲精确到世界协调时(UTC)的几纳秒以内 , UTC是由海军观象台的“主钟”保持的,每台主钟的稳定性为若干个10^(-13)秒 .
- GPS卫星上的计算机和导航信息发生器精确地了解其轨道位置和系统时间 , 而全球监测站网保持连续跟踪卫星的轨道位置和系统时间 . 位于科罗拉多州施里弗(Schriever)空军基地内的主控站与其运控段一起 , 至少每天一次对每颗GPS卫星注入由复杂模型基础上计算出的轨道位置和星上时钟校正数据 .
- 计算GPS接收机(GNSS模组)的三维位置 , 要求GPS接收机至少接收来自4颗卫星的信号 , 根据空间三角形勾股定理和四元一次方程计算得到三维位置.


什么是RTK?
RTK全称Real Time Kinematic (实时动态技术) , 又称载波相位差分技术 , 是一种支持厘米级定位精度的GNSS定位技术(简称RTK技术) , 是实时处理两个测量站载波相位观测量的差分方法 , RTK技术工作过程如下图所示,通过移动网络实时将基准站(GNSS接收机)的生成的DGPS corrections传输给流动站(GNSS接收机)进行计算实现厘米定位 .

RTK技术的应用
- 各种控制测量比如传统的大地测量 , 工程控制测量采用三角网 , 导线网方法来施测,采用RTK技术实时测得定位精度保证观测质量 , 提高作业效率 , 相比常规GPS静态测量 , 快速静态 , 伪动态这些非实时性方法在测量完成后,后续处理若发现精度不合要求还须返测 . 另外RTK技术用于公路控制测量 , 电子线路控制测量 , 水利工程控制测量 , 大地测量 , 可减少人力强度 , 节省费用 , 在几分钟甚至于几秒钟内就可完成控制点测量 .
- 地形测图 . 采用RTK时,仅需一人背着仪器在要测的地形地貌碎部点呆上一二秒种,并同时输入特征编码,通过手簿可以实时知道点位精度,把一个区域测完后回到室内,由专业的软件接口就可以输出所要求的地形图,这样用RTK仅需一人操作,不要求点间通视,大大提高了工作效率,采用RTK配合电子手簿可以测设各种地形图,如普通测图、铁路线路带状地形图的测设,公路管线地形图的测设,配合测深仪可以用于测水库地形图,航 海海洋测图等等。
- 放样程放样是测量一个应用分支,采用RTK技术放样时,仅需把设计好的点位坐标输入到电子手簿中,背着GPS接收机,它会提醒你走到要放样点的位置,既迅速又方便,由于GPS是通过坐标来直接放样的,而且精度很高也很均匀,因而在外业放样中效率会大大提高,且只需一个人操作。
产品尺寸

Windows
Rover
Rover指ZED-F9P GPS-RTK HAT模块作为流动站,连接并接收千寻位置(中国境内使用)或其它参考基站服务商的RTCM3数据流,实现高精度厘米级定位.
千寻位置
本小结仅针对中国大陆用户
1. 账号申请
1).用企业邮箱或个人账号在千寻位置官网注册账号,申请免费试用,厘米级定位试用只有数小时,注意把握时间
2). 获取试用账号后,点击免费试用旁边的控制台,选择千寻知寸FindCM,选择点击进入刚申请的差分账号
3). 选择设备服务号,记录差分账号,差分密码,以备后用
4). 点击设备服务号下面的服务详情,设置开发者配置,并记录账号信息的SIK,SIS,AK,AS以备后用
5). 试用结束,若需要继续使用FindCM服务,可直接购买或续费.



2. u-center设置
1). 下载安装打开u-center软件.
2). 连接ZED-F9P GPS-RTK HAT到PC,等待驱动自动安装完成后在u-center选择对应COM口.
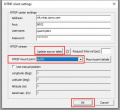
3). 在u-center菜单栏点击打开Receiver-->NTRIP,弹出选项卡,输入Address和Port及差分账号及差分密码.
4). 输入完成后点击Update source table,在NTPIP mount point下拉框选择AUTO后,点击OK保存即可运行RTK服务.
5). 连接千寻服务成功后,u-enter底端显示NTRIP连接状态,模块进入Fixed 状态后的RTK灯常亮,Flaot状态时RTK灯闪烁.

图片一

图片二
图片三

图片四



其它参考基站服务商
1. 境外用户需要申请当地机构参考基站服务,如美国用户向UNAVCO申请,笔者毗邻香港,以Hong Kong Geodetic Survey Services为例进行测试.
1). 下载安装打开u-center软件.
2). 连接ZED-F9P GPS-RTK HAT到PC,等待驱动自动安装完成后在u-center选择对应COM口.
3). 在u-center菜单栏点击打开Receiver-->NTRIP,弹出选项卡,输入下图四或直接复制下面的参数,填写完毕后如下图五所示.
建议参考基站和流动站之间直线距离小于50KM Address: landsd-gncaster.realtime.data.gov.hk Port: 2101 Username: psi_user Password: psi
4). 输入完成后点击Update source table,在NTPIP mount point下拉框选择T430_32后,点击OK保存即可运行RTK服务.
5). NTRIP连接成功后,u-enter底端显示NTRIP连接状态,模块进入Fixed 状态后的RTK灯常亮,Flaot状态时RTK灯闪烁.
图片一
图片二

图片三

图片四

图片五



2. 使用ZED-F9P GPS-RTK HAT建立CORS(Continuous Operational Reference System 连续运行参考站),为其它设备提供RTCM3数据流,实现设备的实时厘米级定位,参考Stationary Base小结
Configuration View选项卡(或直接按下Ctrl+F9打开)
2). 选择MSG(Messages)选项,使能下面RTCM3数据流从UART2输出,具体操作参考下图一设置
RTCM 1077 RTCM 1087 RTCM 1097 RTCM 1127 RTCM 1230 RTCM 4072.0 RTCM 4072.1
3). 保存参数,默认使用纽扣电池作RAM参数保存,如下图二所示
4). MB模块,Rover模块都设置完毕后,使用杜邦线连接两个模块UART2接口(注意MB Module的TXD连接Rover模块的RXD)或者使用无线模块从MB Module透传RTCM3数据流给Rover模块,如下图三所示
5). 连接完毕后,连接MB模块的u-center开启NTRIP client服务,请参考 Rover-->其它参考基站服务商 章节.

图片一

图片二

图片三



2. Rover(以下简称Rover模块)设置
1). 打开另一个u-center(支持在PC上同时打开多个使用),连接Rover模块.注意选择正确串口号
2). 选择菜单栏View-->Configuration View选项卡(或直接按下Ctrl+F9打开),选择MSG(Messages)栏,选择NAV_RELPOSNED,勾选UART1,如下图一所示
3). 再选择CFG栏,选择Save current configuration保存参数,默认使用纽扣电池作RAM参数保存
4). 设置完MB模块,Rover模块并连接两个模块UART2接口后(注意MB Module的TXD连接Rover模块的RXD),打开连接Rover模块的u-center,选择菜单栏View-->Messages View
5). 找到并点击UBX-->RELPOSNED选项即可查看验证Moving Base应用.当MB模块进入Fix定位,Rover模块实时接收MB模块RTCK数据流也会进入Fix定位并输出了相对于MB模块的厘米级定位和导向角,如下图三所示的Length和Heading,其中Length的大小就是两个天线的距离,精度为1cm用户可实时移动Rover模块天线并测量与MB模块天线距离并与u-center上的Length作比较,从侧面验证了ZED-F9P的厘米级定位功能,Heading则表示两天线间的夹角,用户可移动Rover模块天线并观察Heading的变化.

图片一
图片二

图片三


-->
Stationary Base
Stationary Base指ZED-F9P GPS-RTK HAT作为基站,为其它流动站提供相对于基站的厘米级定位精度观测数据.之前提到的千寻位置或UNAVCO或Hong Kong Geodetic Survey Services就是其在各地区组建的基站通过Internet发送观测数据流给附近的流动站,实现附近流动站的厘米级定位.
1. 通过Hong Kong Geodetic Survey Services获取ZED-F9P GPS-RTK HAT进入RTK Fixed状态的定位坐标再设置Stationary Base
1). 获取ZED-F9P GPS-RTK HAT的RTK Fixed 定位坐标,参考Rover章节,获取的RTK Fixed 坐标如图一
2). 设置ZED-F9P GPS-RTK HAT的Fix Postion,参考下图二
3). 通过NTRIP Server/Caster建立本地RTCM3数据流服务,此时ZED-F9P GPS-RTK HAT为Stationary Base,参考下图三
4). 其它流动站连接NTRIP Server获取RTCM3数据流,参考下图四
图片一

图片二

图片三

图片四



2. 通过PPP计算得到本地基站定位坐标后再将ZED-F9P GPS-RTK HAT设置成Stationary Base
参考1
参考2
Raspberry Pi
python例程
用户需向当地机构申请RTCM数据流服务账号后按如下图所示填写后运行例程进行厘米级定位
2.1 树莓派使能硬件串口后重新启动
2.2 断电连接GNSS多频天线到HAT上后再将HAT接入树莓派
2.3 使用minicom查看HAT是否输出NMEA数据
2.4 下载例程并按如图所以填写账号信息并运行程序
mkdir zed-f9p && cd zed-f9p wget https://www.waveshare.net/w/upload/d/d4/ZED-F9P_GPS-RTK_HAT_Demo.zip unzip ZED-F9P_GPS-RTK_HAT_Code.zip cd python sudo pip3 install pynmeagps sudo python3 main.py -u psi_user -p psi -2 landsd-gncaster.realtime.data.gov.hk 2101 T430_32
资料
文档
程序
软件
数据手册
FAQ
免驱动,接上去请耐心等待一会,让驱动自动安装,出现对应的com口即可:

{{{5}}}
免驱动,通过USB连接到树莓派,会出现ttyACM0 驱动描述符

{{{5}}}
- <1.5m CEP(PVT),0.01m+1ppm CEP(RTK)精度值通常是在理想条件下测得的,如在开阔区域且没有信号干扰的情况下。在实际应用中,很多情况都不会符合这些理想条件。
- GPS 信号在城市高楼、密林或恶劣天气条件下会受到干扰,这可能会影响到定位精度也可能受限于信号的遮挡或多路径效应,确保设备在开阔区域使用,尽量避免建筑物和树木的遮挡。
- RTK 精度依赖于基站的质量和与基站的距离。若基站信号不够稳定或基站与移动站之间的距离过远,RTK 的精度可能会降低,确保基站配置正确,尽量减少基站与移动站的距离。
- 天线的安装位置和质量、设备的配置参数等都可能影响最终的定位精度,请使用匹配的天线和确保天线安装位置合适。
{{{5}}}
请确认波特率时候正确,可在U-center 工具确认和配置波特率:

{{{5}}}
技术支持
联系人:黄康信
EMAIL:3005423122@qq.com
电话:0755-83040712
QQ:3005763927
微信:扫下方二维码添加
