“Jetson TX2 NX”的版本间的差异
Waveshare-eng11(讨论 | 贡献) (Created page with "<div class="wiki-pages jet-green-color"> <div class="tabber"> <div class="tabbertab" title="资料"> {{外围模块|colorscheme=jet-green |name=Jetson TX2 NX |img=File:Jetso...") |
|||
| (未显示4个用户的37个中间版本) | |||
| 第1行: | 第1行: | ||
| + | {{DISPLAYTITLE: JETSON NANO TX2 NX}} | ||
<div class="wiki-pages jet-green-color"> | <div class="wiki-pages jet-green-color"> | ||
| + | <div class="tabberlive newwsnav" id="wsnavbar"> | ||
| + | <ul class="tabbernav"> | ||
| + | <li class="nav-link">[[#myintro|说明]]</li> | ||
| + | <li class="nav-link">[[#myresources|资料]]</li> | ||
| + | <li class="nav-link">[[#myfaq|FAQ]]</li> | ||
| + | <li class="nav-link">[[#mysupport|售后]]</li> | ||
| + | </ul> | ||
| + | </div> | ||
<div class="tabber"> | <div class="tabber"> | ||
| − | <div class="tabbertab" title="资料"> | + | <div class="tabbertab" title="资料" id="myresources"> |
| + | |||
| + | <h1>资料</h1> | ||
| + | <div class="tabber" > | ||
{{外围模块|colorscheme=jet-green | {{外围模块|colorscheme=jet-green | ||
|name=Jetson TX2 NX | |name=Jetson TX2 NX | ||
| − | |img=[[File:Jetson-TX2-NX-1.jpg|360px |link=https://{{SERVERNAME}}/shop/Jetson-TX2-NX.htm | Jetson TX2 NX]] | + | |img=<div class="subnavber"> |
| + | <div class="subnavbertab" title="带驱动板">[[File:JETSON-TX2-NX-DEV-KIT-1.jpg|360px |link=https://{{SERVERNAME}}/shop/JETSON-TX2-NX-DEV-KIT.htm | JETSON-TX2-NX-DEV-KIT]]</div> | ||
| + | <div class="subnavbertab" title="核心板">[[File:Jetson-TX2-NX-1.jpg|360px |link=https://{{SERVERNAME}}/shop/Jetson-TX2-NX.htm | Jetson TX2 NX]] </div></div> | ||
|category1=Nvidia Jetson | |category1=Nvidia Jetson | ||
|category2=AI | |category2=AI | ||
| 第15行: | 第29行: | ||
|feature-name3=内存 | |feature-name3=内存 | ||
|feature-value3=4 GB 128-bit LPDDR4 51.2 GB/s | |feature-value3=4 GB 128-bit LPDDR4 51.2 GB/s | ||
| − | }} | + | }}</div> |
| − | + | ==备注== | |
| + | 如果您购买的是微雪提供的带核心板的套件,在出厂的时候,已经预烧了系统在配套的EMMC上,拿到手后可以直接上电启动完成开机配置即可。<br /> | ||
| + | 预烧镜像没有装SDK,需要用户自行下载安装cuda等SDK插件。 | ||
==简介== | ==简介== | ||
NVIDIA Jetson TX2 NX 为入门级嵌入式和边缘产品提供新一代 AI 性能。它体积小,功耗低,是您下一个从制造业、迁移学习、零售业到农业及生命科学 AI 解决方案的理想之选。预训练的 AI 模型、迁移学习工具包和 NVIDIA JetPack SDK 可帮助您将性能强大的产品快速推向市场。 | NVIDIA Jetson TX2 NX 为入门级嵌入式和边缘产品提供新一代 AI 性能。它体积小,功耗低,是您下一个从制造业、迁移学习、零售业到农业及生命科学 AI 解决方案的理想之选。预训练的 AI 模型、迁移学习工具包和 NVIDIA JetPack SDK 可帮助您将性能强大的产品快速推向市场。 | ||
| + | <ol> | ||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | </ol> | ||
| + | ==Jetson TX2 NX 参数== | ||
| + | {|class="list" border="1" | ||
| + | ! GPU | ||
| + | | NVIDIA Pascal 架构,配有 256 个 NVIDIA CUDA® 核心 | ||
| + | |- | ||
| + | ! CPU | ||
| + | | 双核 NVIDIA Denver 2 64 位 CPU 与四核 Arm Cortex-A57 MPCore 处理器联合体 | ||
| + | |- | ||
| + | !内存 | ||
| + | | 4 GB 128 位 LPDDR4 51.2 GB/秒 | ||
| + | |- | ||
| + | ! 存储 | ||
| + | | 16 GB eMMC 5.1 闪存/ M.2 M KEY NVME 固态接口 | ||
| + | |- | ||
| + | !视频编码 | ||
| + | |1x 4K60 | 3x 4K30 | 4x 1080p60 | 8x 1080p30 (H.265)<br /> | ||
| + | 1x 4K60 | 3x 4K30 | 7x 1080p60 | 14x 1080p30 (H.264)<br /> | ||
| + | |- | ||
| + | !视频解码 | ||
| + | |2x 4K60 | 4x 4p30 | 7x 1080p60 | 14x 1080p30<br /> | ||
| + | (H.265 和 H.264)<br /> | ||
| + | |- | ||
| + | ! 摄像头 | ||
| + | |可支持 5 个摄像头 (通过虚拟通道可支持 12 个)<br /> | ||
| + | 12 个通道 MIPI CSI-2 (3x4 或 5x2) <br /> | ||
| + | D-PHY 1.2 (高达 30 Gbps)<br /> | ||
| + | |- | ||
| + | ! 联网 | ||
| + | | Wi-Fi 需要外部芯片<br /> | ||
| + | 10/100/1000 BASE-T 以太网 | ||
| + | |- | ||
| + | ! 显示 | ||
| + | | 2 个多模式 DP 1.2/eDP 1.4/HDMI 2.0 <br /> | ||
| + | 1 个 2 DSI (1.5Gbps/通道) <br /> | ||
| + | |- | ||
| + | ! UPHY | ||
| + | |1 x1 (PCIe Gen3) + 1 x4 (PCIe Gen4)、1 个 USB 3.0、2 个 USB 2.0 | ||
| + | |- | ||
| + | ! IO | ||
| + | |3 个 UART、2 个 SPI、2 个 I2S、4 个 I2C、多个 GPIO | ||
| + | |} | ||
| + | |||
| + | ==JETSON TX2 NX DEV KIT 资源== | ||
| + | :[[File:JETSON-IO-BASE-B-10.png|600px]] | ||
| + | # Jetson TX2 NX模组 | ||
| + | # 40PIN GPIO扩展接口 | ||
| + | # Micro USB接口 | ||
| + | #:用于USB数据传输 | ||
| + | # 千兆以太网端口 | ||
| + | #:10/100/1000Base-T自适应以太网端口 | ||
| + | # 4路USB 3.0接口 | ||
| + | # HDMI高清接口 | ||
| + | # DisplayPort接口 | ||
| + | # DC电源接口 | ||
| + | #: 用于9~19V电源输入 | ||
| + | # 2路MIPI CSI摄像头接口 | ||
| + | #风扇接口 | ||
| + | |||
| + | ==尺寸图== | ||
| + | [[file:JETSON-IO-BASE-B-size.jpg|500px]] | ||
| + | ==烧录系统== | ||
| + | <font style="color:red;">注意JETSON TX2 NX DEV KIT搭配的是官方16eMMC版本的Jetson TX2 NX核心板,不带SD卡卡槽。因此烧录系统需要用到ubuntu 18.04主机,使用SDK Manager工具烧录。</font> | ||
| + | ===主机环境配置=== | ||
| + | *烧录环境: Ubuntu18.04 主机 (虚拟机也可以) | ||
| + | *: 为了下载资源,烧录用的ubuntu18.04主机需要预留大约100G的内存空间 | ||
| + | *[https://developer.nvidia.com/nvidia-sdk-manager SDK Manaeger下载链接] | ||
| + | *:'''为了后续可以正常下载资源和烧录系统,请在NVIDAI DEVELOPER网站点击右上角的JOIN先注册一个账号''' | ||
| + | *将deb文件下载到ubuntu电脑上,然后将deb文件复制到用户主目录下 | ||
| + | *打开终端运行以下程序安装sdk manager | ||
| + | <pre> | ||
| + | sudo apt install ./sdkmanager_[version]-[build#]_amd64.deb | ||
| + | </pre> | ||
| + | 备注:注意将指令中的[version]-[build#] 改成实际下载的文件名 | ||
| + | |||
| + | ===硬件配置(进入recovery 模式)=== | ||
| + | :[[File:jetson-nano-force_recovery.jpg|500px]] | ||
| + | *用跳帽或者杜邦线短接FC REC和GND引脚,位置如上图,位于核心板底下 | ||
| + | *连接DC电源到圆形供电口, 稍等片刻 | ||
| + | *用USB线(注意要是数据线)连接Jetson主板的Micro USB接口到Ubuntu主机 | ||
| + | |||
| + | |||
| + | ===烧录系统=== | ||
| + | *打开ubuntu电脑终端,运行sdkmanager打开软件 | ||
| + | *登录账号 | ||
| + | *如果Jetson 主板有被正常识别到。sdk manager会检测并提示选项 | ||
| + | :[[File:Jetson TX2 NX.png|400px]] | ||
| + | *开发板类型选择JetsonTX2 NX 选项,在JetPack选项中,选择支持的最新系统即可,'''不勾选Host PC''', 然后点击Continue | ||
| + | :[[File:configuration1.png|400px]] | ||
| + | *选择Jetson OS, <font color="red">并将Jetson SDK Components的选项去掉</font>。勾选最下方的第一个协议 | ||
| + | :[[File:configuration2.png|400px]] | ||
| + | *最后点击Continue 等待烧录完成即可。 | ||
| + | **从JetPack4.6.1版本开始,用SDK Manager烧系统的时候会弹出preconfig的窗口。 | ||
| + | *# 这里会默认选择开发板类型。 注意前面选择开发板类型的时候不要选择错误。 | ||
| + | *#这里选择Manual Setup-Jetson ... (不同主板后缀提示不同) | ||
| + | *#这里可以选择runtime或者preconfig, 选择runtime的话,后续需要自己手动配置系统(用户名,密码,语言等), 选择preconfig,可以填入用户名和密码(可以自己定义),会在启动过程中自动配置主板 | ||
| + | [[File:configuration3.png|400px]] | ||
| + | |||
| + | *烧录完成之后,去掉底板的跳帽,接入显示器,重新上电,按照提示进行开机配置(如果是设置的pre-config, 上电后直接进入系统)。 | ||
| + | |||
| + | </div> | ||
| + | |||
| + | <div class="tabbertab" title="使用"><br /> | ||
| + | |||
| + | ==设置系统从固态硬盘启动== | ||
| + | <ol> | ||
| + | <li>将SSD接入Jetson nano TX2 NX,查看SSD的设备号,打开Jetson nano TX2 NX终端输入 | ||
| + | <pre>ls /dev/nvme*</pre>例如会看到有nvme0,nvme0n1。<br> | ||
| + | [[File:identification.png|400px]] | ||
| + | </li> | ||
| + | <li>格式化SSD | ||
| + | <pre>sudo mkfs.ext4 /dev/nvme0n1</pre> | ||
| + | 格式化成功。<br> | ||
| + | [[File:format.png|400px]] | ||
| + | <li>修改启动路径 | ||
| + | <pre>sudo vi /boot/extlinux/extlinux.conf</pre></li> | ||
| + | *以上内容复制一遍放在文件红框的下方并用#注释掉,防止修改错误 | ||
| + | *把未注释的复制内容里的LABEL primary 改成LABLE NX | ||
| + | *找到语句APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0,将mmcblk0p1修改为nvme0n1保存 | ||
| + | *然后第二行的primary改成NX | ||
| + | [[File:NX-configuration.png|400px]] | ||
| + | <li>挂载SSD | ||
| + | <pre>sudo mount /dev/nvme0n1 /mnt</pre></li> | ||
| + | <li>复制系统到SSD(该过程没有信息打印请耐心等待) | ||
| + | <pre>sudo cp -ax / /mnt</pre></li> | ||
| + | <li>复制完成后卸载SSD(不是拆掉SSD) | ||
| + | <pre>sudo umount /mnt/</pre></li> | ||
| + | <li>重启系统 | ||
| + | <pre>sudo reboot</pre></li> | ||
| + | <li>输入 | ||
| + | <pre>df -h</pre> | ||
| + | 显示从固态硬盘启动<br>[[File:enable.png|400px]] | ||
| + | |||
| + | </ol> | ||
| + | |||
| + | ==SDK安装== | ||
| + | Jetpack主要包括系统镜像,库,APIs,开发者工具,示例和一些文档。在SDK Manager软件中,我们首先安装的是OS,也就是系统镜像,未安装的部分便是SDK,如下图:<br> | ||
| + | [[File:SDK.jpg|600px]]<br> | ||
| + | SDK里包含TensorRT、cuDNN、CUDA、Multimedia API、Computer Vision、Developer Tools。 | ||
| + | *'''TensorRT''' :用于图像分类、分割和对象检测神经网络的高性能深度学习推理运行,它加快了深度学习推理的速度,并减少了卷积和反卷积神经网络的运行时内存占用。 | ||
| + | *'''cuDNN''' :CUDA深度神经网络库为深度学习框架提供高性能原语,它包括对卷积、激活函数和张量变换的支持。 | ||
| + | *'''CUDA ''':CUDA工具包为构建 GPU 加速应用程序的 C 和C++开发人员提供了一个全面的开发环境。该工具包包括用于 NVIDIA GPU 的编译器、数学库以及用于调试和优化应用程序性能的工具。 | ||
| + | *'''ultimedia API''' : Jetson Multimedia API为灵活的应用程序开发提供了低级 API。 | ||
| + | *'''Computer Vision''' :VPI(视觉编程接口)是一个软件库,提供在PVA1(可编程视觉加速器)、GPU和CPU上实现的计算机视觉/图像处理算法,其中OpenCV是用于计算机视觉、图像处理和机器学习的领先开源库,现在具有用于实时操作的 GPU 加速功能,其中VisionWorks2是一个用于计算机视觉(CV)和图像处理的软件开发包。 | ||
| + | *'''Developer Tools''' :Developer Tools CUDA工具包为构建GPU加速应用程序的C和C++开发人员提供了一个全面的开发环境。该工具包包括用于NVIDIA GPU的编译器、数学库以及用于调试和优化应用程序性能的工具。 | ||
| + | 以上是SDK的部分功能。 | ||
| + | 前面的系统安装的时候只是安装了基本的系统,其他的JetPack SDK组件,比如CUDA等都需要在系统正常启动后进一步安装,这里提供安装SDK的步骤说明。'''若要安装该部分,请保证是在SSD固态硬盘为主系统的情况下,因为下载内容可能会导致EMMC磁盘容量告急。''' | ||
| + | ===使用SDK Manager安装=== | ||
| + | 使用SDK Manager安装SDK的时候,不需要设置Jetson TX2 NX为recovery模式,也就是不需要进行短接引脚的操作。 | ||
| + | *正常上电启动Jetson TX2 NX | ||
| + | *Jetson TX2 NX进入系统正常启动后,用USB数据线连接Jetson TX2 NX的Micro USB接口到Ubuntu主机 | ||
| + | *Ubuntu主机电脑运行sdkmanager指令打开SDK Managaer(需要先安装SDK Manager) | ||
| + | *类似于前面烧录系统的操作,不同的是,在步骤而中,'''不勾选 OS选项''',而是'''勾选SDK'''' 选项, 然后continue到安装 | ||
| + | *在下载资源之后,会弹窗提示填写用户名和密码,填写Jetson TX2 NX系统的用户名和密码即可 | ||
| + | *等待SDK安装成功 | ||
| + | |||
| + | ===使用指令安装=== | ||
| + | 没有ubuntu或虚拟机的用户,可以选择在Jetson Nano上使用以下指令直接进行安装 | ||
| + | <pre> | ||
| + | sudo apt update | ||
| + | sudo apt install nvidia-jetpack | ||
| + | </pre> | ||
| + | ==FAN== | ||
| + | 安装jtop<br> | ||
| + | sudo apt install python3-pip | ||
| + | sudo pip3 install jetson-stats | ||
| + | sudo reboot | ||
| + | 开机后输入<br> | ||
| + | jtop | ||
| + | 最大化窗口鼠标选择6CTRL,鼠标选择profiles里的mannual选项,然后点击speed旁的[+]号调节风扇风力. | ||
| + | |||
| + | ==系统登录== | ||
| + | ===本地登录=== | ||
| + | Jetson TX2 NX上电,用数据线连接micro usb口和电脑,打开电脑的设别管理器查看是否有新的端口出现,有则查看端口号,可以使用putty用串口登录。 | ||
| + | ===远程登录=== | ||
| + | ====准备工作==== | ||
| + | *用一根网线一端连接Jetson TX2 NX,另一端连接路由器的LAN端口。 | ||
| + | *确保Jetson TX2 NX与你的电脑出于一个路由器下或同一网段。 | ||
| + | |||
| + | ====获取Jetson TX2 NX的IP地址==== | ||
| + | *方法一:登录路由器查找Jetson TX2 NX的IP地址。 | ||
| + | *方法二:你可以通过一些局域网IP扫描工具,这里以[https://www.advanced-ip-scanner.com/ Advanced IP Scanner]为例程 | ||
| + | *# 运行Advanced IP Scanner | ||
| + | *# 点击Scan按钮,扫描当前局域网内的IP地址 | ||
| + | *# 找到'''所有'''Manufacturer中有NVIDIA字样的IP地址并记录<br>[[文件:NVIDIA-ip水印.png|600px]] | ||
| + | *# 将设备上电,并确保设备连接上网络后 | ||
| + | *# 重新点击Scan按钮,扫描当前局域网内的IP地址 | ||
| + | *# 排除掉'''所有先前记录的'''Manufacturer中有NVIDIA字样的IP地址,剩下的就是你的NVIDIA的IP地址了 | ||
| + | *方法三:屏幕IP查询 | ||
| + | *#Jetson TX2 NX连接上网线或者装上无线网卡连接WIFI,在终端输入ifconfig ,查看Jetson TX2 NX的IP地址。 | ||
| + | *#[[文件:有线网络.png|600px]] | ||
| + | |||
| + | ====使用MobaXterm登录==== | ||
| + | =====终端窗口===== | ||
| + | #下载[https://www.waveshare.net/w/upload/c/c3/MobaXterm_Portable_v22.0.zip MobaXterm]远程登录软件,解压即可使用。 | ||
| + | #打开MobaXterm远程登录软件,选择Session,选择ssh。 | ||
| + | #在Remote host输入我们前面查询到的IP地址192.168.15.102(根据自己的实际IP来填写),填写完成后,点击ok。<br>[[File:登录水印.png|600px]] | ||
| + | #点击Accept,输入登录用户名,回车输入登录密码(在输入密码时,屏幕没有变化属于正常现象,点击回车确认即可)<br>[[File:Aceept-1水印.png|600px]] | ||
| + | |||
| + | ====NoMachine登录==== | ||
| + | *相比SSH和VNC大家对Nomachine可能了解不是很多,Nomachine是一款免费的远程桌面软件。 | ||
| + | *NoMachine基本覆盖了所有主流大操作系统,包括Windows,Mac,Linux,iOS,Android和Raspberry等等。 | ||
| + | =====Jetson TX2 NX上安装===== | ||
| + | <ol> | ||
| + | <li>下载、解压Jetson TX2 NX的[https://www.waveshare.net/w/upload/5/5f/Nomachine_7.10.1_1_arm64.zip NoMachine安装包]</li> | ||
| + | <li>解压完成后,使用U盘或者[[#文件传输|文件传输]]方式将.deb文件复制到Jetson TX2 NX中</li> | ||
| + | <li>使用指令来安装<pre>sudo dpkg -i nomachine_7.10.1_1_arm64.deb</pre></li> | ||
| + | </ol> | ||
| + | |||
| + | =====Windows电脑上安装===== | ||
| + | <ul> | ||
| + | <li> | ||
| + | 下载[https://www.waveshare.net/w/upload/d/dd/Nomachine_7.10.1_1.zip NoMachine安装包],打开安装,等待进度条结束,点击Finish,最后还需要重启下电脑<br>[[文件:Nomachine-安装水印.gif]] | ||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====连接Jetson Nano===== | ||
| + | <ol> | ||
| + | <li> | ||
| + | 打开NoMachine,在Search输入Jetson TX2 NX的IP地址。例如:192.168.15.100<br>[[文件:Nomachine-1水印.png|600px]] | ||
| + | </li> | ||
| + | <li>点击Connect to new host 192.168.15.100,输人Jetson TX2 NX登录名和登录密码,点击login<br>[[文件:Nomachine-login水印.png|600px]] | ||
| + | </li> | ||
| + | <li>加载完成后,会出现一些软件介绍界面,我们直接点击ok就可以了<br>[[文件:Nomachine-ok水印.png|600px]] | ||
| + | </li> | ||
| + | <li>此时我们就成功登录Jetson TX2 NX<br>[[文件:Nomachine-success水印.png|600px]] | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | ====VNC登录==== | ||
| + | *在没有显示屏的情况下,想要进入Jetson TX2 NX的桌面,此时就需要使用远程桌面登陆。(建议使用显示屏,VNC有一定延时) | ||
| + | ====配置VNC服务器==== | ||
| + | *Jetson Nano使用vino来作为默认的VNC服务器,但是默认的设置需要进行一些修改。 | ||
| + | <ol> | ||
| + | <li>配置VNC Server<pre> | ||
| + | gsettings set org.gnome.Vino require-encryption false | ||
| + | gsettings set org.gnome.Vino prompt-enabled false | ||
| + | gsettings set org.gnome.Vino authentication-methods "['vnc']" | ||
| + | gsettings set org.gnome.Vino lock-screen-on-disconnect false | ||
| + | gsettings set org.gnome.Vino vnc-password $(echo -n "mypassword"|base64)</pre> | ||
| + | *需要注意的是,不要用sudo来运行上面的命令,mypassword就是连接VNC的密码。 | ||
| + | </li> | ||
| + | <li>设置桌面开机自启,在.config路径下新建一个自启文件<pre> mkdir -p .config/autostart | ||
| + | sudo vim ~/.config/autostart/vino-server.desktop</pre> | ||
| + | 添加以下内容: | ||
| + | <pre>[Desktop Entry] | ||
| + | Type=Application | ||
| + | Name=Vino VNC server | ||
| + | Exec=/usr/lib/vino/vino-server | ||
| + | NoDisplay=true</pre></li> | ||
| + | <li>查看当前用的是什么管理器<pre>cat /etc/X11/default-display-manager</pre></li> | ||
| + | <li>编辑文件<pre>sudo vim /etc/gdm3/custom.conf</pre></li> | ||
| + | <li>把下面三行的注释去掉,其中AutomaticLogin行修改成自己的用户名。 | ||
| + | <pre>WaylandEnable=false | ||
| + | AutomaticLoginEnable = true | ||
| + | AutomaticLogin = waveshare</pre></li> | ||
| + | <li>重启Jetson Nano <pre>sudo reboot</pre></li> | ||
| + | </ol> | ||
| + | |||
| + | =====下载安装VNC Viewer===== | ||
| + | *在电脑上下载安装[https://www.waveshare.net/w/upload/4/4e/VNC-Viewer-6.21.1109-Windows.zip VNC-Viewer]。 | ||
| + | |||
| + | =====使用VNC Viewer远程连接Jetson Nano===== | ||
| + | #打开VNC Viewer,输入Jetson TX2 NX的IP地址回车确认。例如:<pre>192.168.15.102</pre> | ||
| + | #输入前面设置的VNC登录密码,点击ok: | ||
| + | #此时就成功登录Jetson TX2 NX了。<br>[[文件:VNC-DESKTOP水印.png|600px]] | ||
| + | ==Linux操作基础== | ||
| + | ===常见指令介绍=== | ||
| + | ====文件系统==== | ||
| + | =====sudo===== | ||
| + | <ul> | ||
| + | <li>sudo命令以系统管理者的身份执行指令。</li> | ||
| + | <li>要想使用root用户,可使用waveshare用户登录,执行下面命令</li> | ||
| + | <pre> | ||
| + | sudo su #切换为超级用户 | ||
| + | su waveshare #切换普通用户 | ||
| + | </pre> | ||
| + | </ul> | ||
| + | |||
| + | =====ls===== | ||
| + | <ul> | ||
| + | <li>ls命令用于显示指定工作目录下之内容(列出目前工作目录所含之文件及子目录)。</li> | ||
| + | <li>常用的指令:<pre>ls | ||
| + | ls -a #显示所有文件及目录 (. 开头的隐藏文件也会列出) | ||
| + | ls -l #除文件名称外,亦将文件型态、权限、拥有者、文件大小等资讯详细列出 | ||
| + | ls -lh #文件大小以容易理解的格式列出,例如4K | ||
| + | </pre> | ||
| + | |||
| + | </li> | ||
| + | <li><font color="#FF0000">想要学习了解指令更多参数,我们可以使用help指令来查看:</font><pre>ls --help</pre> | ||
| + | |||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====chmod===== | ||
| + | <ul> | ||
| + | <li>chmod命令是控制用户对文件的权限的命令。</li> | ||
| + | <li>Linux/Unix 的文件调用权限分为三级 : 文件所有者(Owner)、用户组(Group)、其它用户(Other Users)。</li> | ||
| + | <li>在下图中,显示了Linux根目录下的详细文件信息。在这些文件信息中, 最重要的就是第一列,它详细描述了文件和目录的权限,而第三与第四列则显示了这个文件和目录属于哪一个用户或组。<br>[[文件:Jetson-chmod.png|600px]] | ||
| + | </li> | ||
| + | <li>Linux的文件属性可以分为三种:只读(r)、写(w)和可执行(x)。但是上面的文件属性却分为10小格,这是因为除了第一格显示目录外,另外三组每组三格分别表示文件所有者权限、同一组内的权限以及其他用户权限。 | ||
| + | *第一栏中如果显示d,则表示这是一个目录;如果是链接文件,则在这里显示l;如果是设备文件,则显示c。 | ||
| + | *第一个rwx栏位:-rwx------ 表示文件拥有者所拥有的权限。 | ||
| + | *第二个rwx栏位:---rwx--- 表示同一工作组内用户权限。 | ||
| + | *第三个rwx栏位:------rwx 表示其他用户权限。 | ||
| + | *例如: | ||
| + | *-rwx rwx rwx 表示无论哪个用户都可以对这个文件读写与执行。 | ||
| + | *-rw- --- --- 表示只有文件拥有者有读写权限,但是没有执行权限。 | ||
| + | *-rw -rw -rw 表示所有用户都有读写权。 | ||
| + | </li> | ||
| + | <li>'''符号模式''' | ||
| + | <ul><li> | ||
| + | who(用户类型) | ||
| + | {|border=1; style="height:280px;width:700px;" | ||
| + | |-style="background:#363636; color:white;" | ||
| + | |who||用户类型||说明 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |u||user||文件所有者 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |g||group||文件所有者所在组 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |o||others||所有其他用户 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |a||all||所用用户, 相当于 ugo | ||
| + | |} | ||
| + | </li></ul> | ||
| + | <ul><li> | ||
| + | operator(符号模式表) | ||
| + | |||
| + | {|border=1; style="height:200px;width:700px;" | ||
| + | |-style="background:#363636; color:white;" | ||
| + | |Operator||说明|| | ||
| + | |-style="background:#E8E8E8;" | ||
| + | | + ||为指定的用户类型增加权限|| | ||
| + | |-style="background:#CFCFCF;" | ||
| + | | - ||去除指定用户类型的权限|| | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |=||设置指定用户权限的设置,即将用户类型的所有权限重新设置|| | ||
| + | |} | ||
| + | </li></ul> | ||
| + | <ul><li> | ||
| + | permission 的符号模式表 | ||
| + | |||
| + | {|border=1; style="height:280px;width:700px;" | ||
| + | |-style="background:#363636; color:white;" | ||
| + | |模式||名字||说明 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |r||读||设置为可读权限 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |w||写||设置为可写权限 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |x||执行权限||设置为可执行权限 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |X||特殊执行权限||只有当文件为目录文件,或者其他类型的用户有可执行权限时,才将文件权限设置可执行 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |s||setuid/gid||当文件被执行时,根据who参数指定的用户类型设置文件的setuid或者setgid权限 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |t||粘贴位||设置粘贴位,只有超级用户可以设置该位,只有文件所有者u可以使用该位 | ||
| + | |} | ||
| + | </li></ul> | ||
| + | <ul><li> | ||
| + | 符号模式实例 | ||
| + | #给file的所有用户增加读权限<pre>chmod a+r file</pre> | ||
| + | #删除file的所有用户的执行权限<pre>chmod a-x file</pre> | ||
| + | #给file的所有用户增加读写权限<pre>chmod a+rw file</pre> | ||
| + | #给file的所有用户增加读写执行权限<pre>chmod +rwx file </pre> | ||
| + | #对file的所有者设置读写权限,清空该用户组和其他用户对file的所有权限(空格代表无权限)<pre>chmod u=rw,go= file</pre> | ||
| + | #对目录waveshare和其子目录层次结构中的所有文件给用户增加读权限,而对用户组和其他用户删除读权限<pre>chmod -R u+r,go-r waveshare</pre> | ||
| + | |||
| + | </li></ul> | ||
| + | </li> | ||
| + | <li>'''八进制语法''' | ||
| + | <ul><li> | ||
| + | chmod命令可以使用八进制数来指定权限。文件或目录的权限位是由9个权限位来控制,每三位为一组,它们分别是文件所有者(User)的读、写、执行,用户组(Group)的读、写、执行以及其它用户(Other)的读、写、执行。 | ||
| + | |||
| + | {|border=1; style="height:280px;width:700px;" | ||
| + | |-style="background:#363636; color:white;" | ||
| + | |#||权限||rwx||二进制 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |7||读 + 写 + 执行||rwx||111 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |6||读 + 写 ||rw-||110 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |5||读 + 执行||rwx||101 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |4||只读||r--||100 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |3||写 + 执行||-wx||011 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |2||只写||-w-||010 | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |1||只执行||--x||001 | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |0||无||---||000 | ||
| + | |} | ||
| + | </li></ul> | ||
| + | <ul><li> | ||
| + | 例如:765的解释如下: | ||
| + | *所有者的权限用数字表达:属主的那三个权限位的数字加起来的总和。如 rwx ,也就是 4+2+1 ,应该是 7。 | ||
| + | *用户组的权限用数字表达:属组的那个权限位数字的相加的总和。如 rw- ,也就是 4+2+0 ,应该是 6。 | ||
| + | *其它用户的权限数字表达:其它用户权限位的数字相加的总和。如 r-x ,也就是 4+0+1 ,应该是 5。 | ||
| + | </li></ul> | ||
| + | <ul><li> | ||
| + | 常用的数字权限 | ||
| + | *400 -r-------- 拥有者能够读,其他任何人不能进行任何操作; | ||
| + | *644 -rw-r–r-- 拥有者都能够读,但只有拥有者可以编辑; | ||
| + | *660 -rw-rw---- 拥有者和组用户都可读和写,其他人不能进行任何操作; | ||
| + | *664 -rw-rw-r-- 所有人都可读,但只有拥有者和组用户可编辑; | ||
| + | *700 -rwx------ 拥有者能够读、写和执行,其他用户不能任何操作; | ||
| + | *744 -rwxr–r-- 所有人都能读,但只有拥有者才能编辑和执行; | ||
| + | *755 -rwxr-xr-x 所有人都能读和执行,但只有拥有者才能编辑; | ||
| + | *777 -rwxrwxrwx 所有人都能读、写和执行(该设置不建议使用)。 | ||
| + | </li></ul> | ||
| + | <ul><li> | ||
| + | 实例 | ||
| + | *给file的所有用户增加读权限,拥有者和组用户可编辑权限<pre>sudo chmod 664 file</pre> | ||
| + | </li></ul> | ||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====touch===== | ||
| + | <ul><li> | ||
| + | touch命令用于修改文件或者目录的时间属性,包括存取时间和更改时间。若文件不存在,系统会建立一个新的文件。</li> | ||
| + | <li>例如,在当前目录下,使用该指令创建一个空白文件"file.txt",输入如下命令:<pre>touch file.txt</pre> | ||
| + | </li></ul> | ||
| + | |||
| + | =====mkdir===== | ||
| + | <ul><li> | ||
| + | <li>mkdir命令用于创建目录。</li> | ||
| + | <li> | ||
| + | 在工作目录下,建立一个名为waveshare的子目录 : | ||
| + | <pre>sudo mkdir waveshare</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 在工作目录下建立一个名为waveshare/test的目录。 | ||
| + | <pre>sudo mkdir -p waveshare/test</pre> | ||
| + | </li> | ||
| + | <li>若waveshare目录原本不存在,则建立一个。(注:本例若不加 -p 参数,且原本 waveshare 目录不存在,则产生错误。)</li> | ||
| + | </li></ul> | ||
| + | |||
| + | =====cd===== | ||
| + | <ul> | ||
| + | <li>切换当前工作目录。 | ||
| + | <pre> | ||
| + | cd .. #返回上一层目录 | ||
| + | cd /home/waveshare #进入/home/waveshare 目录 | ||
| + | cd #返回用户目录 | ||
| + | </pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====cp===== | ||
| + | <ul> | ||
| + | <li>cp命令主要用于复制文件或目录。</li> | ||
| + | <li> | ||
| + | 参数: | ||
| + | *-a:此选项通常在复制目录时使用,它保留链接、文件属性,并复制目录下的所有内容。其作用等于dpR参数组合。 | ||
| + | *-d:复制时保留链接。这里所说的链接相当于 Windows 系统中的快捷方式。 | ||
| + | *-f:覆盖已经存在的目标文件而不给出提示。 | ||
| + | *-i:与 -f 选项相反,在覆盖目标文件之前给出提示,要求用户确认是否覆盖,回答y时目标文件将被覆盖。 | ||
| + | *-p:除复制文件的内容外,还把修改时间和访问权限也复制到新文件中。 | ||
| + | *-r:若给出的源文件是一个目录文件,此时将复制该目录下所有的子目录和文件。 | ||
| + | *-l:不复制文件,只是生成链接文件。 | ||
| + | </li> | ||
| + | <li> | ||
| + | 使用指令cp将当前目录test/下的所有文件复制到新目录 newtest 下,输入如下命令: | ||
| + | <pre>sudo cp –r test/ newtest </pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====mv===== | ||
| + | <ul> | ||
| + | <li> | ||
| + | mv命令用来为文件或目录改名、或将文件或目录移入其它位置。 | ||
| + | </li> | ||
| + | <li> | ||
| + | 参数: | ||
| + | *-b: 当目标文件或目录存在时,在执行覆盖前,会为其创建一个备份。 | ||
| + | *-i: 如果指定移动的源目录或文件与目标的目录或文件同名,则会先询问是否覆盖旧文件,输入y表示直接覆盖,输入n表示取消该操作。 | ||
| + | *-f: 如果指定移动的源目录或文件与目标的目录或文件同名,不会询问,直接覆盖旧文件。 | ||
| + | *-n: 不要覆盖任何已存在的文件或目录。 | ||
| + | *-u:当源文件比目标文件新或者目标文件不存在时,才执行移动操作。 | ||
| + | </li> | ||
| + | <li> | ||
| + | 使用指令mv将当前目录test/下的file1文件复制到新目录/home/waveshare下,输入如下命令: | ||
| + | <pre>sudo mv file1 /home/waveshare</pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====rm===== | ||
| + | <ul> | ||
| + | <li>rm命令用于删除一个文件或者目录。</li> | ||
| + | <li> | ||
| + | 参数: | ||
| + | *-i 删除前逐一询问确认。 | ||
| + | *-f 即使原档案属性设为唯读,亦直接删除,无需逐一确认。 | ||
| + | *-r 将目录及以下之档案亦逐一删除。 | ||
| + | </li> | ||
| + | <li> | ||
| + | *删除文件可以直接使用rm命令,若删除目录则必须配合选项"-r",例如: | ||
| + | <pre>sudo rm test.txt </pre> | ||
| + | *rm:是否删除 一般文件 "test.txt"? y | ||
| + | <pre>sudo rm homework </pre> | ||
| + | *rm: 无法删除目录"homework": 是一个目录 | ||
| + | <pre>sudo rm -r homework </pre> | ||
| + | *rm:是否删除 目录 "homework"? y | ||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====reboot===== | ||
| + | <ul> | ||
| + | <li>reboot命令用于用来重新启动计算机,更改Tinker Board 2的配置经常需要重启。</li> | ||
| + | <li> | ||
| + | 参数: | ||
| + | *-n : 在重开机前不做将记忆体资料写回硬盘的动作 | ||
| + | *-w : 并不会真的重开机,只是把记录写到 /var/log/wtmp 档案里 | ||
| + | *-d : 不把记录写到 /var/log/wtmp 档案里(-n 这个参数包含了 -d) | ||
| + | *-f : 强迫重开机,不呼叫 shutdown 这个指令 | ||
| + | *-i : 在重开机之前先把所有网络相关的装置先停止 | ||
| + | </li> | ||
| + | <li> | ||
| + | 重新启动 | ||
| + | <pre>sudo reboot</pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | =====shutdown===== | ||
| + | </font> | ||
| + | <ul> | ||
| + | <li> | ||
| + | Jetson Nano的关机是不能直接拔掉电源线的,因为Tinker Board 2会将内存作为暂存区,如果直接拔掉电源线会使一些在内存中的数据没有来得及写入SD卡中,从而造成数据的丢失或是损坏SD卡上的数据,造成系统无法启动。 | ||
| + | </li> | ||
| + | <li> | ||
| + | 参数 | ||
| + | *-t seconds : 设定在几秒钟之后进行关机程序。 | ||
| + | *-k : 并不会真的关机,只是将警告讯息传送给所有使用者。 | ||
| + | *-r : 关机后重新开机。 | ||
| + | *-h : 关机后停机。 | ||
| + | *-n : 不采用正常程序来关机,用强迫的方式杀掉所有执行中的程序后自行关机。 | ||
| + | *-c : 取消目前已经进行中的关机动作。 | ||
| + | *-f : 关机时,不做 fsck 动作(检查 Linux 档系统)。 | ||
| + | *-F : 关机时,强迫进行 fsck 动作。 | ||
| + | *time : 设定关机的时间。 | ||
| + | *message : 传送给所有使用者的警告讯息。 | ||
| + | </li> | ||
| + | <li>实例</li> | ||
| + | *立即关机 | ||
| + | <pre>sudo shutdown -h now</pre> | ||
| + | *指定 10 分钟后关机 | ||
| + | <pre>sudo shutdown -h 10</pre> | ||
| + | *重新启动计算机 | ||
| + | <pre>sudo shutdown -r now</pre> | ||
| + | <li>无论使用哪一个命令来关闭系统都需要root用户权限,如果用户使用linaro这样的普通用户,可以使用sudo命令暂时获得root权限。</li> | ||
| + | </ul> | ||
| + | |||
| + | =====pwd===== | ||
| + | <ul><li>该pwd命令显示当前工作目录的名称:在Jetson nano上,输入pwd将输出类似/home/waveshare。</li></ul> | ||
| + | |||
| + | =====head===== | ||
| + | <ul><li> | ||
| + | 该head命令显示文件的开头。可用于-n指定要显示的行数(默认为 10 行),或与-c指定字节数。 | ||
| + | <pre>head test.py -n 5</pre> | ||
| + | </li></ul> | ||
| + | |||
| + | =====tail===== | ||
| + | <ul><li>该tail显示文件的结尾。-c字节或-n行数指定文件中的起始点</li></ul> | ||
| + | |||
| + | =====df===== | ||
| + | <ul><li> | ||
| + | 用于df显示已安装文件系统上可用和使用的磁盘空间。用于df -h以可读的格式查看输出,使用 M 表示 MB,而不是显示字节数。 | ||
| + | <pre>df -h</pre> | ||
| + | </li></ul> | ||
| + | |||
| + | =====tar===== | ||
| + | <ul><li> | ||
| + | tar命令是用来建立,还原备份文件的工具程序,它可以加入,解开备份文件内的文件。</li> | ||
| + | <li> | ||
| + | 压缩文件: | ||
| + | <pre>tar -cvzf waveshare.tar.gz *</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 解压文件: | ||
| + | <pre>tar -xvzf waveshare.tar.gz </pre> | ||
| + | </li></ul> | ||
| + | =====apt===== | ||
| + | *apt(Advanced Packaging Tool)是一个在 Debian 和 Ubuntu 中的 Shell 前端软件包管理器。 | ||
| + | *apt 命令提供了查找、安装、升级、删除某一个、一组甚至全部软件包的命令,而且命令简洁而又好记。 | ||
| + | *apt 命令执行需要超级管理员权限(root)。 | ||
| + | *apt 常用命令 | ||
| + | **列出所有可更新的软件清单命令:sudo apt update | ||
| + | **升级软件包:sudo apt upgrade | ||
| + | **列出可更新的软件包及版本信息:apt list --upgradeable | ||
| + | **升级软件包,升级前先删除需要更新软件包:sudo apt full-upgrade | ||
| + | **安装指定的软件命令:sudo apt install <package_name> | ||
| + | **安装多个软件包:sudo apt install <package_1> <package_2> <package_3> | ||
| + | **更新指定的软件命令:sudo apt update <package_name> | ||
| + | **显示软件包具体信息,例如:版本号,安装大小,依赖关系等等:sudo apt show <package_name> | ||
| + | **删除软件包命令:sudo apt remove <package_name> | ||
| + | **清理不再使用的依赖和库文件: sudo apt autoremove | ||
| + | **移除软件包及配置文件: sudo apt purge <package_name> | ||
| + | **查找软件包命令: sudo apt search <keyword> | ||
| + | **列出所有已安装的包:apt list --installed | ||
| + | **列出所有已安装的包的版本信息:apt list --all-versions | ||
| + | *例如我们安装nano编辑器<pre>sudo apt install nano</pre> | ||
| + | |||
| + | ====网络==== | ||
| + | =====ifconfig===== | ||
| + | <ul> | ||
| + | <li>用于在不带任何参数(即)ifconfig运行时显示当前系统上接口的网络配置详细信息。</li> | ||
| + | <li>用SSH连接时可以通过ifconfig查找IP地址,终端输入<pre>ifconfig</pre></li> | ||
| + | <li>查看有线网络IP地址,终端输入<pre>ifconfig eth0</pre></li> | ||
| + | <li>查看无线网络IP地址,终端输入<pre>ifconfig wlan0</pre></li> | ||
| + | </ul> | ||
| + | |||
| + | =====hostname===== | ||
| + | <ul> | ||
| + | <li>该hostname命令显示系统的当前主机名。我们使用Jetson Nano的时候经常需要使用远程工具,而默认的网络配置IP地址采用动态分配,会造成IP地址不确定的问题</li> | ||
| + | <li>当我们的Jetson Nano的IP地址发生变化时,可以使用主机名登录。</li> | ||
| + | </ul> | ||
| + | <ol> | ||
| + | <li> | ||
| + | 登录Jetson Nano,修改hosts文件,命令如下: | ||
| + | <pre>sudo vim /etc/hosts</pre> | ||
| + | *将jp46替换成要修改的名字,例如waveshare,按下键盘ZZ保存、退出: | ||
| + | [[文件:Jetson-hosts.png|600px]] | ||
| + | </li> | ||
| + | <li> | ||
| + | 修改hostname文件,将这里jp46也替换成要修改的名字,例如waveshare,按下键盘ZZ:<pre>sudo vim /etc/hostname</pre> | ||
| + | [[文件:Jetson-hostname.png|600px]] | ||
| + | </li> | ||
| + | <li>修改完成重启Jetson Nano即可:<pre>sudo reboot</pre></li> | ||
| + | <li>我们也可以使用如下命令查看IP地址:<pre>hostname -I</pre></li> | ||
| + | </ol> | ||
| + | |||
| + | ===Vim编辑器使用=== | ||
| + | *Vim编辑器是所有Unix及Linux系统下标准的编辑器,它的强大不逊色于任何最新的文本编辑器,这里只是简单地介绍一下它的用法和常用命令。 | ||
| + | *基本上 vim 共分为三种模式,分别是命令模式(Command mode),输入模式(Insert mode)和底线命令模式(Last line mode)。 | ||
| + | **命令模式:控制屏幕光标的移动,字符、字或行的删除,移动复制某区段。 | ||
| + | **输入模式:在此模式下输入字符,编辑文件。 | ||
| + | **底线模式:将文件保存或退出vim,也可以设置编辑环境,如寻找字符串、列出行号等。 | ||
| + | **我们可以将这三个模式想成底下的图标来表示: | ||
| + | [[文件:Vim模式水印-1.png|600px]] | ||
| + | <ol> | ||
| + | <li>首先删除默认Vi编辑器<pre>sudo apt-get remove vim-common</pre></li> | ||
| + | <li>然后重装Vim<pre>sudo apt-get install vim</pre></li> | ||
| + | <li>为方便使用还得在/etc/vim/vimrc文件后面添加下面三句 | ||
| + | <pre>set nu #显示行号 | ||
| + | syntax on #语法高亮 | ||
| + | set tabstop=4 #tab退四格</pre> | ||
| + | </li> | ||
| + | </ol> | ||
| + | ====常用命令==== | ||
| + | <ul> | ||
| + | <li>打开文件、保存、关闭文件(vi命令模式下使用) | ||
| + | <pre> vim filename //打开filename文件 | ||
| + | :w //保存文件 | ||
| + | :q //退出编辑器,如果文件已修改请使用下面的命令 | ||
| + | :q! //退出编辑器,且不保存 | ||
| + | :wq //退出编辑器,且保存文件 | ||
| + | :wq! //强制退出编辑器,且保存文件 | ||
| + | ZZ //退出编辑器,且保存文件 | ||
| + | ZQ //退出编辑器,且不保存</pre> | ||
| + | </li> | ||
| + | <li>插入文本或行(vi命令模式下使用,执行下面命令后将进入插入模式,按ESC键可退出插入模式) | ||
| + | <pre> a //在当前光标位置的右边添加文本 | ||
| + | i //在当前光标位置的左边添加文本 | ||
| + | A //在当前行的末尾位置添加文本 | ||
| + | I //在当前行的开始处添加文本(非空字符的行首) | ||
| + | O //在当前行的上面新建一行 | ||
| + | o //在当前行的下面新建一行 | ||
| + | R //替换(覆盖)当前光标位置及后面的若干文本 | ||
| + | J //合并光标所在行及下一行为一行(依然在命令模式)</pre> | ||
| + | </li> | ||
| + | |||
| + | <li>删除、恢复字符或行(vi命令模式下使用) | ||
| + | <pre> x //删除当前字符 | ||
| + | nx //删除从光标开始的n个字符 | ||
| + | dd //删除当前行 | ||
| + | ndd //向下删除当前行在内的n行 | ||
| + | u //撤销上一步操作 | ||
| + | U //撤销对当前行的所有操作</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 复制、粘贴(vi命令模式下使用) | ||
| + | <pre> yy //将当前行复制到缓存区 | ||
| + | nyy //将当前行向下n行复制到缓冲区 | ||
| + | yw //复制从光标开始到词尾的字符 | ||
| + | nyw //复制从光标开始的n个单词 | ||
| + | y^ //复制从光标到行首的内容 | ||
| + | y$ //复制从光标到行尾的内容 | ||
| + | p //粘贴剪切板里的内容在光标后 | ||
| + | P //粘贴剪切板里的内容在光标前</pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | ==配置== | ||
| + | ===文件传输=== | ||
| + | *本教程以Windows系统远程连接到Linux服务器为例,有多种方式可以把本地的文件上传到服务器。 | ||
| + | ====MobaXterm文件传输==== | ||
| + | *使用MobaXterm工具传输文件是非常简单、方便的 | ||
| + | **将文件从Windows传输到树莓派只需拖动文件到MobaXterm左边目录里即可 | ||
| + | **同理,将树莓派文件传输到Windows,只需拖动MobaXterm左边目录里文件到Windows即可。<br>[[文件:MobaXterm-文件传输.gif]] | ||
| + | |||
| + | ====NoMachine文件传输==== | ||
| + | *当使用NoMachine远程连接成功后,Jetson Nano桌面右上角会出现NoMachine图标,我们点击图标,选择Transfer a file | ||
| + | **Upload file from the client是将文件从Windows电脑传输到Jetson Nano上 | ||
| + | **Download file from the server是将文件从Jetson Nano传输到Windows电脑上<br>[[文件:Nomachine-filetransfer水印.png|600px]] | ||
| + | |||
| + | ====SCP文件传输==== | ||
| + | <ul> | ||
| + | <li>SCP命令可用于跨Linux系统安全地复制或加密传输文件和目录。</li> | ||
| + | <li>格式:<pre>scp +参数 +用户名/登陆名+@+主机名/IP地址+ : + 目标文件路径+本地存放路径</pre></li> | ||
| + | <li>首先进入要存放文件的目录按住键盘Shift且右键空白处,打开Windows PowerShell</li> | ||
| + | <li> | ||
| + | 将file文件从Jetson Nano复制到本地Windows,在终端输入<pre>scp waveshare@192.168.15.100:file .</pre> | ||
| + | 其中“.”表示当前路径 | ||
| + | </li> | ||
| + | <li> | ||
| + | 将file文件从本地Windows复制到Jetson Nano,在终端输入<pre>scp file waveshare@192.168.15.100:</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 将file文件夹从Jetson Nano复制到本地Windows,由于file是一个目录,就需要加上参数r,在终端输入 <pre>scp -r waveshare@192.168.15.100:/home/pi/file .</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 将file文件夹从本地Windows复制到Jetson Nano,在终端输入<pre> scp -r file waveshare@192.168.15.100:</pre> | ||
| + | </li> | ||
| + | <font color="#FF0000">'''注意:以上的waveshare需要改成你的系统的用户名,IP地址改成Jetson Nano实际IP地址。'''</font> | ||
| + | </ul> | ||
| + | |||
| + | ====文件共享(Samba)==== | ||
| + | <p> | ||
| + | 使用Samba服务可实现文件共享。在windows的网上邻居即可访问Jetson TX2 NX文件系统,非常方便。 | ||
| + | </p> | ||
| + | <ol> | ||
| + | <li> | ||
| + | 首先安装Samba,在终端输入<pre>sudo apt-get update | ||
| + | sudo apt-get install samba -y</pre> | ||
| + | </li> | ||
| + | <li>在/home/waveshare目录下创建共享文件夹sambashare<pre>mkdir sambashare</pre></li> | ||
| + | <li> | ||
| + | 安装完成后,修改配置文件/etc/samba/smb.conf:<pre>sudo nano /etc/samba/smb.conf</pre> | ||
| + | 拉到文件的最后,将下面的语句添加到文件尾部 | ||
| + | <pre> | ||
| + | [sambashare] | ||
| + | comment = Samba on JetsonNano | ||
| + | path = /home/waveshare/sambashare | ||
| + | read only = no | ||
| + | browsable = yes</pre> | ||
| + | <font color="#FF0000">'''注意:这里的waveshare需要改成你的系统的用户名。也就是说path是你要设置的共享文件夹路径。'''</font> | ||
| + | </li> | ||
| + | <li> | ||
| + | 重启Samba服务<pre>sudo service smbd restart</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 设置共享文件夹密码<pre>sudo smbpasswd -a waveshare</pre> | ||
| + | <font color="#FF0000">'''注意:这里的username需要改成你系统的用户名,如果不是用户名就会失败。'''</font><br><font color="#FF0000">'''这里会要求设置Samba密码,建议是直接用你的系统的密码,比较方便记忆'''</font> | ||
| + | </li> | ||
| + | <li> | ||
| + | 设置完成之后,在你的电脑端,打开文件管理器<pre>\\192.168.15.100\sambashare</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 输入登录名和前面第5步设置的密码<br>[[文件:Jetson-samba水印.png|600px]] | ||
| + | </li> | ||
| + | <li>我们来验证下,在windows新建test文件夹,在Jetson TX2 NX sambashare目录下就可以看到test文件夹<br>[[文件:Jetson-nano-Samba1水印.png|600px]]<br>[[文件:Jetson-nano-Samba水印.png|600px]] | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | |||
| + | ===摄像头=== | ||
| + | 查看接入的第一个摄像头画面: | ||
| + | nvgstcapture-1.0 | ||
| + | 查看接入的第二个摄像头画面: | ||
| + | nvgstcapture-1.0 --sensor-id=1 | ||
| + | <br> | ||
| + | <!-- | ||
| + | 默认摄像头型号是IMX219如果需要更改其他型号的摄像头执行<br> | ||
| + | sudo /opt/nvidia/jetson-io/jetson-io.py | ||
| + | 选择Configure Jetson Nano CSI Connector -> Configure for compatible hardware <br> | ||
| + | 选择对应的摄像头型号<br> | ||
| + | | Camera IMX219 Dual |<br> | ||
| + | | Je Camera IMX477 Dual or: |<br> | ||
| + | | Camera IMX477-A and IMX219-B |<br> | ||
| + | | ConfigurCamera IMX219 Dualardware |<br> | ||
| + | 选择之后 Save pin changes -> Save and reboot to reconfigure pins <br> | ||
| + | 等待重启即可<br> | ||
| + | --> | ||
| + | ==AI入门== | ||
| + | *本教程基于JetPack4.6系统镜像,Python版本为Python3.6,TensorFlow版本为2.5.0,Pytorch版本为1.9.0为例。 | ||
| + | *注意:[https://docs.nvidia.com/deeplearning/frameworks/install-tf-jetson-platform-release-notes/tf-jetson-rel.html#tf-jetson-rel TensorFlow版本]和[https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-pytorch Pytorch版本]一定要和JetPack版本相互对应。 | ||
| + | ===PIP安装=== | ||
| + | <ol> | ||
| + | <li>Jetson Nano中默认安装了 Python3.6 版本,直接安装PIP<pre>sudo apt update | ||
| + | sudo apt-get install python3-pip python3-dev</pre></li> | ||
| + | <li>安装完成后我们查看PIP版本<pre>pip3 -V</pre> | ||
| + | [[文件:Pip3 9.0.1.png|600px]] | ||
| + | </li> | ||
| + | <li>默认安装的PIP是 9.01 版本,需要把它升级到最新版<pre>python3 -m pip install --upgrade pip</pre> | ||
| + | [[文件:Pip-21.png|600px]] | ||
| + | </li> | ||
| + | <li>升级成功后,查看pip版本信息,发现有些问题<pre>pip3 -V</pre> | ||
| + | [[文件:Pip-V.png|600px]] | ||
| + | </li> | ||
| + | <li>我们使用命令如下解决<pre>python3 -m pip install --upgrade --force-reinstall pip | ||
| + | sudo reboot</pre> | ||
| + | [[文件:Pip-V1.png|600px]] | ||
| + | </li> | ||
| + | <li>安装机器学习领域重要的安装包<pre>安装机器学习领域重要的包 | ||
| + | sudo apt-get install python3-numpy | ||
| + | sudo apt-get install python3-scipy | ||
| + | sudo apt-get install python3-pandas | ||
| + | sudo apt-get install python3-matplotlib | ||
| + | sudo apt-get install python3-sklearn</pre> | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | ===设置CUDA环境=== | ||
| + | <ol> | ||
| + | <li>查看CUDA版本,出现command not found,需要配置下环境<pre>nvcc -V | ||
| + | cat /usr/local/cuda/version.txt</pre> | ||
| + | [[文件:Cat-cuda10.2.png|600px]] | ||
| + | <br><font color="#FF0000">'''注意:这里使用cat命令查看不到版本,进入/usr/local/目录查看下是否有CUDA目录,<br>如果没有参考后面未安装CUDA部分安装CUDA,安装完成后再配置环境。'''</font> | ||
| + | </li> | ||
| + | <li>设置环境变量<pre>sudo vim .bashrc | ||
| + | 在文件末尾加入: | ||
| + | export PATH=/usr/local/cuda-10.2/bin:$PATH | ||
| + | export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH | ||
| + | export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-10.2</pre> | ||
| + | [[文件:Bashrc-cuda.png|600px]] | ||
| + | </li> | ||
| + | <li>更新环境变量<pre>source .bashrc</pre></li> | ||
| + | <li>再次查看CUDA版本<pre>nvcc -V</pre> | ||
| + | [[文件:Nvcc-cuda-success.png|600px]] | ||
| + | </li> | ||
| + | </ol> | ||
| + | ===Tensorflow GPU环境搭建=== | ||
| + | <ol> | ||
| + | <li>安装所需要的包<pre>sudo apt-get install libhdf5-serial-dev hdf5-tools libhdf5-dev zlib1g-dev zip libjpeg8-dev liblapack-dev libblas-dev gfortran | ||
| + | sudo pip3 install -U pip testresources setuptools==49.6.0</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 安装 python 的依赖项 | ||
| + | <pre>sudo pip3 install -U --no-deps numpy==1.19.4 future==0.18.2 mock==3.0.5 keras_preprocessing==1.1.2 keras_applications==1.0.8 gast==0.4.0 protobuf pybind11 cython pkgconfig packaging | ||
| + | sudo env H5PY_SETUP_REQUIRES=0 pip3 install -U h5py==3.1.0</pre> | ||
| + | </li> | ||
| + | <li>安装Tensorflow(在线安装经常失败,可以参考第4步离线安装) | ||
| + | <pre>sudo pip3 install --pre --extra-index-url https://developer.download.nvidia.com/compute/redist/jp/v46 tensorflow</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 最后建议离线安装,先登录英伟达官网下载[https://developer.nvidia.com/embedded/downloads TensorFlow安装包](以jetpack4.6 TensorFlow2.5.0 nv21.08为例,建议使用火狐浏览器下载)<br> | ||
| + | [[文件:Jp46-TensorFlow.png|600px]] | ||
| + | <pre>pip3 install tensorflow-2.5.0+nv21.8-cp36-cp36m-linux_aarch64.whl</pre> | ||
| + | </li> | ||
| + | <li>安装完成后,检查是否安装成功,在终端输入<pre>python3 | ||
| + | import tensorflow as tf</pre> | ||
| + | [[File:Tensorflow-success.png|600px]] | ||
| + | </li> | ||
| + | <li>查看版本信息<pre>tf.__version__</pre> | ||
| + | [[文件:Tensorflow-version.png|600px]] | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | ===Pytorch环境搭建=== | ||
| + | ====Pytorch安装==== | ||
| + | <ol> | ||
| + | <li>首先登录英伟达官网下载[https://forums.developer.nvidia.com/t/pytorch-for-jetson-version-1-11-now-available/72048 Pytorch安装包],我们以PyTorch v1.9.0为例<br>[[文件:Torch-download.png|600px]]</li> | ||
| + | <li>下载依赖库<pre>sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev libopenblas-base libopenmpi-dev | ||
| + | </pre></li> | ||
| + | <li>安装Pytorch<pre>sudo pip3 install torch-1.9.0-cp36-cp36m-linux_aarch64.whl </pre></li> | ||
| + | <li>验证Pytorch是否安装成功<pre>python3 | ||
| + | import torch | ||
| + | x = torch.rand(5, 3) | ||
| + | print(x)</pre> | ||
| + | [[文件:Torch-success.png|600px]] | ||
| + | </li> | ||
| + | <li>查看版本信息<pre>import torch | ||
| + | print(torch.__version__)</pre> | ||
| + | [[文件:Torch-verson.png|600px]] | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | ====Torchvision安装==== | ||
| + | <ol> | ||
| + | <li>Torchvision版本要与Pytorch版本相匹配,我们前面安装的Pytorch版本为1.9.0,Torchvision安装 v0.10.0版本<br>[[文件:Pytorch-torchvision.png|600px]]</li> | ||
| + | <li>下载、安装torchvision<pre>git clone --branch v0.10.0 https://github.com/pytorch/vision torchvision | ||
| + | cd torchvision | ||
| + | export BUILD_VERSION=0.10.0 | ||
| + | sudo python3 setup.py install</pre></li> | ||
| + | <li>验证Torchvision是否安装成功<pre>python3 | ||
| + | import torchvision</pre> | ||
| + | [[文件:Torchvision.png|600px]] | ||
| + | <li>出现报错可能是Pillow版本太高,卸载重装<pre>sudo pip3 uninstall pillow | ||
| + | sudo pip3 install pillow</pre> | ||
| + | [[文件:Pillow9.1.1.png|600px]] | ||
| + | </li> | ||
| + | </li> | ||
| + | <li>查看版本信息<pre>import torchvision | ||
| + | print(torchvision.__version__)</pre> | ||
| + | [[文件:Torchvision-version.png|600px]] | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | ===Yolo V4环境搭建=== | ||
| + | <ol> | ||
| + | <li>首先在github上下载darknet<pre>git clone https://github.com/AlexeyAB/darknet.git</pre></li> | ||
| + | <li>下载完成后,需要修改下Makefile文件<pre>cd darknet | ||
| + | sudo vim Makefile</pre> | ||
| + | 将前四行0改成1 | ||
| + | <pre>GPU=1 | ||
| + | CUDNN=1 | ||
| + | CUDNN_HALF=1 | ||
| + | OPENCV=1</pre> | ||
| + | </li> | ||
| + | <li>cuda版本和路径也要改成我们的实际版本和路径,否则会编译失败<pre>将NVCC=nvcc修改为 | ||
| + | NVCC=/usr/local/cuda-10.2/bin/nvcc</pre> | ||
| + | </li> | ||
| + | <li>修改完成后进行编译,在终端输入<pre>sudo make</pre> | ||
| + | </li> | ||
| + | ====使用YOLOv4进行推理==== | ||
| + | *基本的推理方法有三种:图片、视频、摄像头 ( 实时影像 ) | ||
| + | *选择Yolo v4和Yolo v4-tiny(更轻量化的模型,适合在Jetson Nano上运行)进行测试。首先需要下载已训练好的模型权重文件 | ||
| + | =====图片测试===== | ||
| + | <ol> | ||
| + | <li>测试<pre>./darknet detector test cfg/coco.data cfg/yolov4.cfg yolov4.weights data/dog.jpg</pre> | ||
| + | [[文件:yolov4-test水印1.png|600px]] | ||
| + | </li> | ||
| + | <li>如果要开启图片的话需使用 test模式,他会在执行之后要你输入图片的位置 | ||
| + | <pre>./darknet detector test ./cfg/coco.data ./cfg/yolov4.cfg ./yolov4.weights</pre> | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | =====视频测试===== | ||
| + | <ol> | ||
| + | <li>Yolov4-tiny 视频的检测(github下来的data里面并没有该视频文件,需要用户自行上传要检测的视频文件到 data 文件夹下) | ||
| + | <pre>./darknet detector demo cfg/coco.data cfg/yolov4-tiny.cfg yolov4-tiny.weights data/xxx.mp4</pre> | ||
| + | [[文件:yolo-MP4水印.png|600px]] | ||
| + | <br>帧数大约是14帧 | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | =====实时图像测试===== | ||
| + | <ol> | ||
| + | <li>查看USB摄像头的设备号<pre>ls /dev/video* | ||
| + | ./darknet detector demo cfg/coco.data cfg/yolov4-tiny.cfg yolov4-tiny.weights /dev/video0 "nvarguscamerasrc ! video/x-raw(memory:NVMM), width=1280, height=720, format=NV12, framerate=30/1 ! nvvidconv ! video/x-raw, width=1280, height=720, format=BGRx ! videoconvert ! video/x-raw, format=BGR ! appsink" | ||
| + | ./darknet detector demo cfg/coco.data cfg/yolov4.cfg yolov4.weights /dev/video0 "nvarguscamerasrc ! video/x-raw(memory:NVMM), width=1280, height=720, format=NV12, framerate=30/1 ! nvvidconv ! video/x-raw, width=1280, height=720, format=BGRx ! videoconvert ! video/x-raw, format=BGR ! appsink"</pre> | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | ===Hello AI World=== | ||
| + | |||
| + | *Hello AI World项目集成了NVIDIA非常强大的 TensroRT 加速引擎,将性能提升了数倍以上。 | ||
| + | ====环境搭建==== | ||
| + | <ol> | ||
| + | <li>安装cmake<pre>sudo apt-get update | ||
| + | sudo apt-get install git cmake libpython3-dev python3-numpy</pre></li> | ||
| + | <li>获取jetson-inference开源项目 | ||
| + | <pre>git clone https://github.com/dusty-nv/jetson-inference | ||
| + | cd jetson-inference | ||
| + | git submodule update --init</pre> | ||
| + | |||
| + | </li> | ||
| + | <li> | ||
| + | 新建文件夹,编译<br> | ||
| + | <font color="red">注意</font>:编译不报错才能正常运行下面的示例。 | ||
| + | <pre>sudo mkdir build | ||
| + | cd build | ||
| + | sudo cmake ../</pre> | ||
| + | 由于内容是外网上的,可能导致下载不了box.com上的文件,所以下载模型和Pytorch界面我们选择跳过(Quit和Skip)。<br> | ||
| + | [[文件:Jetson-inference-model水印.png|600px]] | ||
| + | [[文件:Jetson-inference-pytorch水印.png|600px]] | ||
| + | </li> | ||
| + | <li> | ||
| + | 下载[https://github.com/dusty-nv/jetson-inference/releases 模型],然后再放置到jetson-inference/data/networks目录下,然后解压,为了方便用户,这里我们提供部分模型参考下载指令: | ||
| + | <pre>cd ~/jetson-inference/data/networks/ | ||
| + | #如果你需要下载更多的算法,请参考这里的方法,首先在github上获取model的下载地址,然后用wget 加指令下载。这里下载三个model以作参考 | ||
| + | wget https://github.com/dusty-nv/jetson-inference/releases/download/model-mirror-190618/facenet-120.tar.gz | ||
| + | wget https://github.com/dusty-nv/jetson-inference/releases/download/model-mirror-190618/GoogleNet.tar.gz | ||
| + | wget https://github.com/dusty-nv/jetson-inference/releases/download/model-mirror-190618/SSD-Mobilenet-v2.tar.gz | ||
| + | #下面的指令是解压前面下载的model的,只有解压出来才能用 | ||
| + | tar -zxvf facenet-120.tar.gz | ||
| + | tar -zxvf GoogleNet.tar.gz | ||
| + | tar -zxvf SSD-Mobilenet-v2.tar.gz | ||
| + | </pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 也可以使用U盘或者[[#文件传输|文件传输]]方式将文件复制到Jetson Nano中 | ||
| + | <pre>cd jetson-inference/build | ||
| + | sudo make | ||
| + | sudo make install</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 安装v4l摄像头驱动,终端输入<pre> | ||
| + | sudo apt-get install v4l-utils | ||
| + | v4l2-ctl --list-formats-ext</pre> | ||
| + | </li> | ||
| + | </ol> | ||
| + | |||
| + | ====DetectNet运行实时摄像头检测==== | ||
| + | <ul> | ||
| + | <li>使用摄像头对环境物体进行识别<pre> | ||
| + | cd ~/jetson-inference/build/aarch64/bin/ | ||
| + | ./detectnet-camera</pre> | ||
| + | [[文件:Helloai-camera水印.png|600px]] | ||
| + | <br>使用TensorRT加速帧率达到24帧。 | ||
| + | </li> | ||
| + | <li> | ||
| + | 下面是可供下载的预训练对象检测网络表,以及用于加载预训练模型的相关--network参数:<pre>./detectnet-camera --network=facenet #运行使用面部识别网络 | ||
| + | ./detectnet-camera --network=multiped #运行使用多级行人/行李探测器 | ||
| + | ./detectnet-camera --network=pednet #运行使用原始单级行人探测器 | ||
| + | ./detectnet-camera --network=coco-bottle #在摄像头下检测 瓶/汽水罐 | ||
| + | ./detectnet-camera --network=coco-dog #在摄像头下检测狗</pre> | ||
| + | </li> | ||
| + | <li> | ||
| + | 让我们使用detectnet程序在静态图像中定位对象。除了输入/输出路径之外,还有一些额外的命令行选项: | ||
| + | *更改正在使用的检测模型的可选--network标志(默认为 SSD-Mobilenet-v2)。 | ||
| + | *--overlay标志,可以是逗号分隔的box, lines, labels, conf, 和none | ||
| + | **默认--overlay=box,labels,conf显示框、标签和置信度值 | ||
| + | **该box选项绘制填充的边界框,而lines仅绘制未填充的轮廓 | ||
| + | *--alpha值,设置覆盖期间使用的 alpha 混合值(默认值为120)。 | ||
| + | *--threshold设置检测的最小阈值的可选值(默认为0.5)。 | ||
| + | *--camera 标志设置要使用的摄像头设备 | ||
| + | **默认为使用 MIPI CSI 传感器 0(--camera=0) | ||
| + | *--width 和--height 标志设置相机分辨率(默认为 1280x720) | ||
| + | ** | ||
| + | </li> | ||
| + | <li>分辨率应设置为相机支持的格式,使用v4l2-ctl --list-formats-ext查询<pre>./detectnet-camera --network=facenet #使用 FaceNet,默认 MIPI CSI 相机(1280×720) | ||
| + | ./detectnet-camera --camera=/dev/video1 --network=facenet #使用 PedNet,V4L2 摄像机/dev/video1(1280x720) | ||
| + | ./detectnet-camera --width=640 --height=480 --network=facenet #使用 PedNet,默认 MIPI CSI 摄像机(640x480)</pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | ==硬件控制== | ||
| + | *Jetson TX1、TX2、AGX Xavier 和 Nano 开发板包含一个 40 针 GPIO 接头,类似于 Raspberry Pi 中的 40 针接头。 | ||
| + | ===GPIO=== | ||
| + | *可以使用 Jetson GPIO 库包中提供的 Python 库来控制这些 GPIO 的数字输入和输出。 | ||
| + | *Jetson GPIO 库提供了 RPi.GPIO 库提供的所有公共 API。下面讨论每个 API 的使用: | ||
| + | <ol> | ||
| + | <li>要导入 Jetson.GPIO 模块,请使用:<pre>import Jetson.GPIO as GPIO</pre></li> | ||
| + | <li>管脚编号 | ||
| + | <ul> | ||
| + | <li>Jetson GPIO 库提供了四种对 I/O 引脚进行编号的方法。</li> | ||
| + | <li>前两个对应RPi.GPIO库提供的模式,即BOARD和BCM,分别指的是40针GPIO头的针号和Broadcom SoC GPIO号。</li> | ||
| + | <li>其余两种模式,CVM 和 TEGRA_SOC 使用字符串而不是数字,分别对应于 CVM/CVB 连接器和 Tegra SoC 上的信号名称。</li> | ||
| + | <li>要指定您使用的模式(强制),请使用以下函数调用: | ||
| + | <pre>GPIO.setmode(GPIO.BOARD) | ||
| + | GPIO.setmode(GPIO.BCM) | ||
| + | GPIO.setmode(GPIO.CVM) | ||
| + | GPIO.setmode(GPIO.TEGRA_SOC)</pre></li> | ||
| + | <li>要检查已设置的模式,您可以调用:<pre>mode = GPIO.getmode()</pre> | ||
| + | 模式必须是 GPIO.BOARD、GPIO.BCM、GPIO.CVM、GPIO.TEGRA_SOC 或 None 之一。</li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | |||
| + | <li> | ||
| + | 如果GRIO检测到一个引脚已经被设置成了非默认值,那么你将看到一个警告信息。 | ||
| + | <ul> | ||
| + | <li>你可以通过下列代码禁用警告:<pre>GPIO.setwarnings(False)</pre></li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | |||
| + | <li> | ||
| + | 设置频道 | ||
| + | <ul> | ||
| + | <li>GPIO 通道必须在用作输入或输出之前进行设置。要将通道配置为输入,请调用:<pre># (where channel is based on the pin numbering mode discussed above) | ||
| + | GPIO.setup(channel, GPIO.IN)</pre></li> | ||
| + | <li>要将通道设置为输出,请调用:<pre>GPIO.setup(channel, GPIO.OUT)</pre></li> | ||
| + | <li>也可以为输出通道指定一个初始值:<pre>GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH)</pre></li> | ||
| + | <li>将通道设置为输出时,也可以同时设置多个通道:<pre># add as many as channels as needed. You can also use tuples: (18,12,13) | ||
| + | channels = [18, 12, 13] | ||
| + | GPIO.setup(channels, GPIO.OUT)</pre></li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | |||
| + | <li> | ||
| + | 输入 | ||
| + | <ul> | ||
| + | <li>要读取通道的值,请使用:<pre>GPIO.input(channel) | ||
| + | 这将返回 GPIO.LOW 或 GPIO.HIGH。</pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | |||
| + | <li> | ||
| + | 输出 | ||
| + | <ul> | ||
| + | <li>要设置配置为输出的引脚的值,请使用:<pre>GPIO.output(channel, state) | ||
| + | 其中状态可以是 GPIO.LOW 或 GPIO.HIGH。</pre></li> | ||
| + | <li>您还可以输出到通道列表或元组:<pre>channels = [18, 12, 13] # or use tuples | ||
| + | GPIO.output(channels, GPIO.HIGH) # or GPIO.LOW | ||
| + | # set first channel to LOW and rest to HIGH | ||
| + | GPIO.output(channel, (GPIO.LOW, GPIO.HIGH, GPIO.HIGH))</pre></li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | |||
| + | <li> | ||
| + | 清理 | ||
| + | <ul> | ||
| + | <li>在程序结束时,最好清理通道,以便将所有引脚设置为默认状态。要清理所有使用的通道,请调用:<pre>GPIO.cleanup()</pre></li> | ||
| + | <li>如果您不想清理所有频道,也可以清理单个频道或频道列表或元组:<pre>GPIO.cleanup(chan1) # cleanup only chan1 | ||
| + | GPIO.cleanup([chan1, chan2]) # cleanup only chan1 and chan2 | ||
| + | GPIO.cleanup((chan1, chan2)) # does the same operation as previous statement</pre></li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | |||
| + | <li> | ||
| + | Jetson Board 信息和库版本 | ||
| + | <ul> | ||
| + | <li>要获取有关 Jetson 模块的信息,请使用/阅读:<pre>GPIO.JETSON_INFO</pre> | ||
| + | 这提供了一个带有以下键的 Python 字典:P1_REVISION、RAM、REVISION、TYPE、MANUFACTURER 和 PROCESSOR。字典中的所有值都是字符串,但 P1_REVISION 是一个整数。 | ||
| + | </li> | ||
| + | <li>要获取有关库版本的信息,请使用/阅读:<pre>GPIO.VERSION</pre> | ||
| + | 这提供了一个具有 XYZ 版本格式的字符串。 | ||
| + | </li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | |||
| + | <li> | ||
| + | 中断 | ||
| + | <ul> | ||
| + | 除了忙轮询之外,该库还提供了三种额外的方法来监视输入事件: | ||
| + | <li> | ||
| + | wait_for_edge() 函数</li> | ||
| + | <li>此函数阻塞调用线程,直到检测到提供的边缘。该函数可以如下调用:<pre>GPIO.wait_for_edge(channel, GPIO.RISING)</pre></li> | ||
| + | <li>第二个参数指定要检测的边沿,可以是 GPIO.RISING、GPIO.FALLING 或 GPIO.BOTH。如果您只想将等待限制为指定的时间,可以选择设置超时:<pre># timeout is in milliseconds | ||
| + | GPIO.wait_for_edge(channel, GPIO.RISING, timeout=500)</pre> | ||
| + | 该函数返回检测到边缘的通道,如果发生超时,则返回 None。</li> | ||
| + | |||
| + | <li>event_detected() 函数</li> | ||
| + | <li>此函数可用于定期检查自上次调用以来是否发生了事件。该函数可以按如下方式设置和调用:<pre># set rising edge detection on the channel | ||
| + | GPIO.add_event_detect(channel, GPIO.RISING) | ||
| + | run_other_code() | ||
| + | if GPIO.event_detected(channel): | ||
| + | do_something()</pre> | ||
| + | 和以前一样,您可以检测 GPIO.RISING、GPIO.FALLING 或 GPIO.BOTH 的事件。</li> | ||
| + | <li>检测到边缘时运行的回调函数</li> | ||
| + | <li>此功能可用于为回调函数运行第二个线程。因此,回调函数可以与您的主程序并发运行以响应边缘。此功能可按如下方式使用:<pre># define callback function | ||
| + | def callback_fn(channel): | ||
| + | print("Callback called from channel %s" % channel) | ||
| + | |||
| + | # add rising edge detection | ||
| + | GPIO.add_event_detect(channel, GPIO.RISING, callback=callback_fn)</pre></li> | ||
| + | <li>如果需要,也可以添加多个回调,如下所示:<pre>def callback_one(channel): | ||
| + | print("First Callback") | ||
| + | |||
| + | def callback_two(channel): | ||
| + | print("Second Callback") | ||
| + | |||
| + | GPIO.add_event_detect(channel, GPIO.RISING) | ||
| + | GPIO.add_event_callback(channel, callback_one) | ||
| + | GPIO.add_event_callback(channel, callback_two)</pre> | ||
| + | 在这种情况下,两个回调按顺序运行,而不是同时运行,因为只有线程运行所有回调函数。</li> | ||
| + | |||
| + | <li>为了通过将多个事件合并为一个事件来防止多次调用回调函数,可以选择设置去抖动时间:<pre># bouncetime set in milliseconds | ||
| + | GPIO.add_event_detect(channel, GPIO.RISING, callback=callback_fn, | ||
| + | bouncetime=200)</pre> | ||
| + | <li>如果不再需要边缘检测,可以将其删除,如下所示:<pre>GPIO.remove_event_detect(channel)</pre></li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | <li> | ||
| + | 检查GPIO通道功能 | ||
| + | <ul> | ||
| + | <li> | ||
| + | 此功能允许您检查提供的 GPIO 通道的功能:<pre>GPIO.gpio_function(channel) | ||
| + | 该函数返回 GPIO.IN 或 GPIO.OUT。</pre></li> | ||
| + | </ul> | ||
| + | </li> | ||
| + | </ol> | ||
| + | ====点亮LED灯==== | ||
| + | <ul> | ||
| + | <li>示例程序<pre>import Jetson.GPIO as GPIO | ||
| + | import time as time | ||
| + | |||
| + | LED_Pin = 11 | ||
| + | |||
| + | GPIO.setwarnings(False) | ||
| + | GPIO.setmode(GPIO.BOARD) | ||
| + | GPIO.setup(LED_Pin, GPIO.OUT) | ||
| + | |||
| + | while (True): | ||
| + | GPIO.output(LED_Pin, GPIO.HIGH) | ||
| + | time.sleep(0.5) | ||
| + | GPIO.output(LED_Pin, GPIO.LOW) | ||
| + | time.sleep(0.5) | ||
| + | </pre> | ||
| + | </li> | ||
| + | </ul> | ||
| + | ====例程使用==== | ||
| + | <ul> | ||
| + | <li>针对jetson.gpio库,官方也提供了一些简单的例程</li> | ||
| + | <li>首先下载jetson-gpio: | ||
| + | <pre>git clone https://github.com/NVIDIA/jetson-gpio</pre></li> | ||
| + | |||
| + | <li>下载完成后,我们就可以使用里面的例程了,例如simple_input.py可以读取引脚的状态<pre>cd /opt/nvidia/jetson-gpio/samples/ | ||
| + | sudo python3 simple_input.py</pre> | ||
| + | |||
| + | </li> | ||
| + | </ul> | ||
| + | |||
| + | ===IIC=== | ||
| + | <ol> | ||
| + | <li>首先安装I2Ctool,终端输入:<pre>sudo apt-get update | ||
| + | sudo apt-get install -y i2c-tools | ||
| + | sudo apt-get install -y python3-smbus</pre> | ||
| + | </li> | ||
| + | <li>检查安装情况,终端输入:<pre>apt-cache policy i2c-tools</pre> | ||
| + | 输出如下即为安装成功 | ||
| + | <pre>i2c-tools: | ||
| + | 已安装:4.0-2 | ||
| + | 候选: 4.0-2 | ||
| + | 版本列表: | ||
| + | *** 4.0-2 500 | ||
| + | 500 http://ports.ubuntu.com/ubuntu-ports bionic/universe arm64 Packages | ||
| + | 100 /var/lib/dpkg/status</pre></li> | ||
| + | |||
| + | </ol> | ||
| + | |||
| + | ====i2cdetect==== | ||
| + | <ul> | ||
| + | <li>查询i2c设备:<pre> sudo i2cdetect -y -r -a 0</pre> | ||
| + | [[文件:Jetson-i2c0.png|600px]] | ||
| + | *参数: -y是无视交互问题直接执行,-r是SMBus read byte命令,-a是所有地址,0是指SMBus 0。 | ||
| + | </li> | ||
| + | <li>扫描寄存器数据:<pre>sudo i2cdump -y 0 0x68</pre> | ||
| + | |||
| + | |||
| + | </li> | ||
| + | <li> | ||
| + | 寄存器数据写入:<pre>sudo i2cset -y 0 0x68 0x90 0x55</pre> | ||
| + | |||
| + | <ul><li> | ||
| + | 参数: | ||
| + | {|border=1; style="height:200px;width:700px;" | ||
| + | |-style="background:#363636; color:white;" | ||
| + | |参数||含义|| | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |-y||代表取消用户交互过程,直接执行命令|| | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |0||代表I2C设备号|| | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |0x68||代表I2C设备地址|| | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |0x90||代表寄存器地址|| | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |0x55||代表向寄存器写入的数据|| | ||
| + | |} | ||
| + | </li></ul> | ||
| + | </li> | ||
| + | <li> | ||
| + | 寄存器数据读出:<pre>sudo i2cget -y 0 0x68 0x90</pre> | ||
| + | |||
| + | <ul><li> | ||
| + | 参数: | ||
| + | {|border=1; style="height:200px;width:700px;" | ||
| + | |-style="background:#363636; color:white;" | ||
| + | |参数||含义|| | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |-y||代表取消用户交互过程,直接执行命令|| | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |0||代表I2C设备号|| | ||
| + | |-style="background:#E8E8E8;" | ||
| + | |0x68||代表I2C设备地址|| | ||
| + | |-style="background:#CFCFCF;" | ||
| + | |0x90||代表寄存器地址|| | ||
| + | |} | ||
| + | </li></ul> | ||
| + | </li> | ||
| + | </ul> | ||
==NVIDIA官方资料== | ==NVIDIA官方资料== | ||
*[https://developer.nvidia.com/jetson-tx2-nx-system-module-data-sheet Jetson TX2 NX SOM 数据手册] | *[https://developer.nvidia.com/jetson-tx2-nx-system-module-data-sheet Jetson TX2 NX SOM 数据手册] | ||
| 第26行: | 第1,313行: | ||
*[https://developer.nvidia.com/jetson-tx2-nx-3d-cad-step-model-envelopezip Jetson TX2 NX 3D 图纸] | *[https://developer.nvidia.com/jetson-tx2-nx-3d-cad-step-model-envelopezip Jetson TX2 NX 3D 图纸] | ||
*[https://developer.nvidia.com/embedded/downloads#?search=TX2%20NX&tx=$product,jetson_tx2 Jetson TX2 NX 资料下载路径] | *[https://developer.nvidia.com/embedded/downloads#?search=TX2%20NX&tx=$product,jetson_tx2 Jetson TX2 NX 资料下载路径] | ||
| + | |||
==软件== | ==软件== | ||
{{RPI-LCD Software}} | {{RPI-LCD Software}} | ||
</div> | </div> | ||
| − | <div class="tabbertab" title="FAQ"><br /> | + | <div class="tabbertab" title="FAQ" id="myfaq"> |
| + | |||
| + | <h1>FAQ</h1> | ||
| + | {{FAQ|为什么我的Jetson TX2 NX DEV KIT安装SDK显示空间不足? | ||
| + | |因为启动的是EMMC上的系统,空间不足以完全安装SDK,可按照教程把固态硬盘修改为系统启动。 | ||
| + | |||}} | ||
| + | <br /> | ||
</div> | </div> | ||
| − | <div class="tabbertab" title="售后"><br />{{ | + | <div class="tabbertab" title="售后" id="mysupport"> |
| + | |||
| + | <h1>技术支持</h1> | ||
| + | <br />{{Service26}}</div> | ||
<br /> | <br /> | ||
</div> | </div> | ||
</div> | </div> | ||
2024年2月4日 (日) 10:59的最新版本
资料
| ||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||

备注
如果您购买的是微雪提供的带核心板的套件,在出厂的时候,已经预烧了系统在配套的EMMC上,拿到手后可以直接上电启动完成开机配置即可。
预烧镜像没有装SDK,需要用户自行下载安装cuda等SDK插件。
简介
NVIDIA Jetson TX2 NX 为入门级嵌入式和边缘产品提供新一代 AI 性能。它体积小,功耗低,是您下一个从制造业、迁移学习、零售业到农业及生命科学 AI 解决方案的理想之选。预训练的 AI 模型、迁移学习工具包和 NVIDIA JetPack SDK 可帮助您将性能强大的产品快速推向市场。
Jetson TX2 NX 参数
| GPU | NVIDIA Pascal 架构,配有 256 个 NVIDIA CUDA® 核心 |
|---|---|
| CPU | 双核 NVIDIA Denver 2 64 位 CPU 与四核 Arm Cortex-A57 MPCore 处理器联合体 |
| 内存 | 4 GB 128 位 LPDDR4 51.2 GB/秒 |
| 存储 | 16 GB eMMC 5.1 闪存/ M.2 M KEY NVME 固态接口 |
| 视频编码 | 3x 4K30 | 4x 1080p60 | 8x 1080p30 (H.265) 1x 4K60 | 3x 4K30 | 7x 1080p60 | 14x 1080p30 (H.264) |
| 视频解码 | 4x 4p30 | 7x 1080p60 | 14x 1080p30 (H.265 和 H.264) |
| 摄像头 | 可支持 5 个摄像头 (通过虚拟通道可支持 12 个) 12 个通道 MIPI CSI-2 (3x4 或 5x2) |
| 联网 | Wi-Fi 需要外部芯片 10/100/1000 BASE-T 以太网 |
| 显示 | 2 个多模式 DP 1.2/eDP 1.4/HDMI 2.0 1 个 2 DSI (1.5Gbps/通道) |
| UPHY | 1 x1 (PCIe Gen3) + 1 x4 (PCIe Gen4)、1 个 USB 3.0、2 个 USB 2.0 |
| IO | 3 个 UART、2 个 SPI、2 个 I2S、4 个 I2C、多个 GPIO |
JETSON TX2 NX DEV KIT 资源

- Jetson TX2 NX模组
- 40PIN GPIO扩展接口
- Micro USB接口
- 用于USB数据传输
- 千兆以太网端口
- 10/100/1000Base-T自适应以太网端口
- 4路USB 3.0接口
- HDMI高清接口
- DisplayPort接口
- DC电源接口
- 用于9~19V电源输入
- 2路MIPI CSI摄像头接口
- 风扇接口
尺寸图

烧录系统
注意JETSON TX2 NX DEV KIT搭配的是官方16eMMC版本的Jetson TX2 NX核心板,不带SD卡卡槽。因此烧录系统需要用到ubuntu 18.04主机,使用SDK Manager工具烧录。
主机环境配置
- 烧录环境: Ubuntu18.04 主机 (虚拟机也可以)
- 为了下载资源,烧录用的ubuntu18.04主机需要预留大约100G的内存空间
- SDK Manaeger下载链接
- 为了后续可以正常下载资源和烧录系统,请在NVIDAI DEVELOPER网站点击右上角的JOIN先注册一个账号
- 将deb文件下载到ubuntu电脑上,然后将deb文件复制到用户主目录下
- 打开终端运行以下程序安装sdk manager
sudo apt install ./sdkmanager_[version]-[build#]_amd64.deb
备注:注意将指令中的[version]-[build#] 改成实际下载的文件名
硬件配置(进入recovery 模式)

- 用跳帽或者杜邦线短接FC REC和GND引脚,位置如上图,位于核心板底下
- 连接DC电源到圆形供电口, 稍等片刻
- 用USB线(注意要是数据线)连接Jetson主板的Micro USB接口到Ubuntu主机
烧录系统
- 打开ubuntu电脑终端,运行sdkmanager打开软件
- 登录账号
- 如果Jetson 主板有被正常识别到。sdk manager会检测并提示选项

- 开发板类型选择JetsonTX2 NX 选项,在JetPack选项中,选择支持的最新系统即可,不勾选Host PC, 然后点击Continue

- 选择Jetson OS, 并将Jetson SDK Components的选项去掉。勾选最下方的第一个协议

- 最后点击Continue 等待烧录完成即可。
- 从JetPack4.6.1版本开始,用SDK Manager烧系统的时候会弹出preconfig的窗口。
- 这里会默认选择开发板类型。 注意前面选择开发板类型的时候不要选择错误。
- 这里选择Manual Setup-Jetson ... (不同主板后缀提示不同)
- 这里可以选择runtime或者preconfig, 选择runtime的话,后续需要自己手动配置系统(用户名,密码,语言等), 选择preconfig,可以填入用户名和密码(可以自己定义),会在启动过程中自动配置主板

- 烧录完成之后,去掉底板的跳帽,接入显示器,重新上电,按照提示进行开机配置(如果是设置的pre-config, 上电后直接进入系统)。
设置系统从固态硬盘启动
- 将SSD接入Jetson nano TX2 NX,查看SSD的设备号,打开Jetson nano TX2 NX终端输入
ls /dev/nvme*
例如会看到有nvme0,nvme0n1。

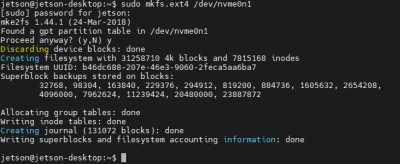
- 格式化SSD
sudo mkfs.ext4 /dev/nvme0n1
格式化成功。
- 修改启动路径
sudo vi /boot/extlinux/extlinux.conf
- 以上内容复制一遍放在文件红框的下方并用#注释掉,防止修改错误
- 把未注释的复制内容里的LABEL primary 改成LABLE NX
- 找到语句APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0,将mmcblk0p1修改为nvme0n1保存
- 然后第二行的primary改成NX
- 挂载SSD
sudo mount /dev/nvme0n1 /mnt
- 复制系统到SSD(该过程没有信息打印请耐心等待)
sudo cp -ax / /mnt
- 复制完成后卸载SSD(不是拆掉SSD)
sudo umount /mnt/
- 重启系统
sudo reboot
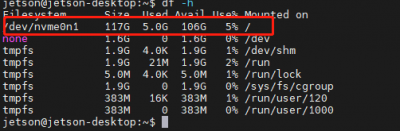
- 输入
df -h
显示从固态硬盘启动



SDK安装
Jetpack主要包括系统镜像,库,APIs,开发者工具,示例和一些文档。在SDK Manager软件中,我们首先安装的是OS,也就是系统镜像,未安装的部分便是SDK,如下图:

SDK里包含TensorRT、cuDNN、CUDA、Multimedia API、Computer Vision、Developer Tools。
- TensorRT :用于图像分类、分割和对象检测神经网络的高性能深度学习推理运行,它加快了深度学习推理的速度,并减少了卷积和反卷积神经网络的运行时内存占用。
- cuDNN :CUDA深度神经网络库为深度学习框架提供高性能原语,它包括对卷积、激活函数和张量变换的支持。
- CUDA :CUDA工具包为构建 GPU 加速应用程序的 C 和C++开发人员提供了一个全面的开发环境。该工具包包括用于 NVIDIA GPU 的编译器、数学库以及用于调试和优化应用程序性能的工具。
- ultimedia API : Jetson Multimedia API为灵活的应用程序开发提供了低级 API。
- Computer Vision :VPI(视觉编程接口)是一个软件库,提供在PVA1(可编程视觉加速器)、GPU和CPU上实现的计算机视觉/图像处理算法,其中OpenCV是用于计算机视觉、图像处理和机器学习的领先开源库,现在具有用于实时操作的 GPU 加速功能,其中VisionWorks2是一个用于计算机视觉(CV)和图像处理的软件开发包。
- Developer Tools :Developer Tools CUDA工具包为构建GPU加速应用程序的C和C++开发人员提供了一个全面的开发环境。该工具包包括用于NVIDIA GPU的编译器、数学库以及用于调试和优化应用程序性能的工具。
以上是SDK的部分功能。 前面的系统安装的时候只是安装了基本的系统,其他的JetPack SDK组件,比如CUDA等都需要在系统正常启动后进一步安装,这里提供安装SDK的步骤说明。若要安装该部分,请保证是在SSD固态硬盘为主系统的情况下,因为下载内容可能会导致EMMC磁盘容量告急。
使用SDK Manager安装
使用SDK Manager安装SDK的时候,不需要设置Jetson TX2 NX为recovery模式,也就是不需要进行短接引脚的操作。
- 正常上电启动Jetson TX2 NX
- Jetson TX2 NX进入系统正常启动后,用USB数据线连接Jetson TX2 NX的Micro USB接口到Ubuntu主机
- Ubuntu主机电脑运行sdkmanager指令打开SDK Managaer(需要先安装SDK Manager)
- 类似于前面烧录系统的操作,不同的是,在步骤而中,不勾选 OS选项,而是勾选SDK' 选项, 然后continue到安装
- 在下载资源之后,会弹窗提示填写用户名和密码,填写Jetson TX2 NX系统的用户名和密码即可
- 等待SDK安装成功
使用指令安装
没有ubuntu或虚拟机的用户,可以选择在Jetson Nano上使用以下指令直接进行安装
sudo apt update sudo apt install nvidia-jetpack
FAN
安装jtop
sudo apt install python3-pip sudo pip3 install jetson-stats sudo reboot
开机后输入
jtop
最大化窗口鼠标选择6CTRL,鼠标选择profiles里的mannual选项,然后点击speed旁的[+]号调节风扇风力.
系统登录
本地登录
Jetson TX2 NX上电,用数据线连接micro usb口和电脑,打开电脑的设别管理器查看是否有新的端口出现,有则查看端口号,可以使用putty用串口登录。
远程登录
准备工作
- 用一根网线一端连接Jetson TX2 NX,另一端连接路由器的LAN端口。
- 确保Jetson TX2 NX与你的电脑出于一个路由器下或同一网段。
获取Jetson TX2 NX的IP地址
- 方法一:登录路由器查找Jetson TX2 NX的IP地址。
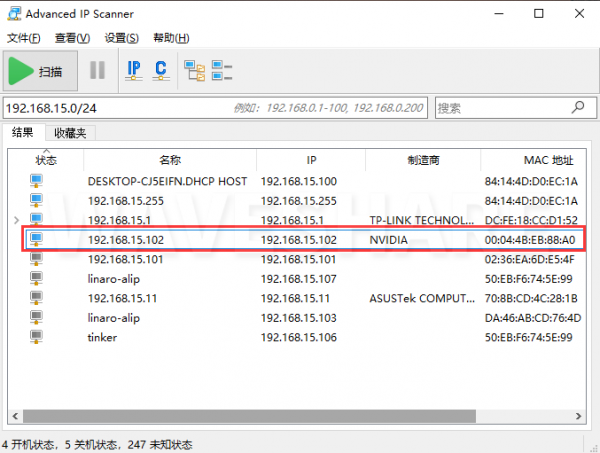
- 方法二:你可以通过一些局域网IP扫描工具,这里以Advanced IP Scanner为例程
- 运行Advanced IP Scanner
- 点击Scan按钮,扫描当前局域网内的IP地址
- 找到所有Manufacturer中有NVIDIA字样的IP地址并记录
- 将设备上电,并确保设备连接上网络后
- 重新点击Scan按钮,扫描当前局域网内的IP地址
- 排除掉所有先前记录的Manufacturer中有NVIDIA字样的IP地址,剩下的就是你的NVIDIA的IP地址了
- 方法三:屏幕IP查询
- Jetson TX2 NX连接上网线或者装上无线网卡连接WIFI,在终端输入ifconfig ,查看Jetson TX2 NX的IP地址。



使用MobaXterm登录
终端窗口
- 下载MobaXterm远程登录软件,解压即可使用。
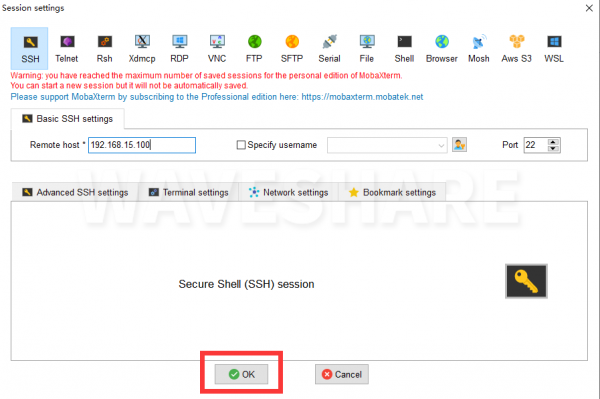
- 打开MobaXterm远程登录软件,选择Session,选择ssh。
- 在Remote host输入我们前面查询到的IP地址192.168.15.102(根据自己的实际IP来填写),填写完成后,点击ok。
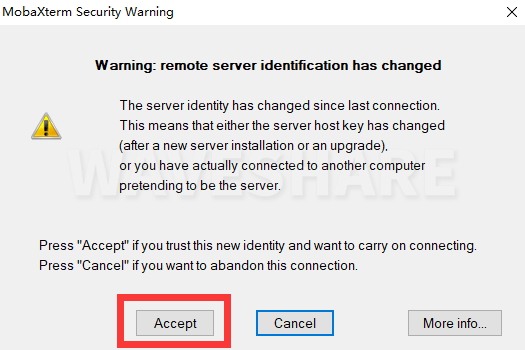
- 点击Accept,输入登录用户名,回车输入登录密码(在输入密码时,屏幕没有变化属于正常现象,点击回车确认即可)


NoMachine登录
- 相比SSH和VNC大家对Nomachine可能了解不是很多,Nomachine是一款免费的远程桌面软件。
- NoMachine基本覆盖了所有主流大操作系统,包括Windows,Mac,Linux,iOS,Android和Raspberry等等。
Jetson TX2 NX上安装
- 下载、解压Jetson TX2 NX的NoMachine安装包
- 解压完成后,使用U盘或者文件传输方式将.deb文件复制到Jetson TX2 NX中
- 使用指令来安装
sudo dpkg -i nomachine_7.10.1_1_arm64.deb
Windows电脑上安装
-
下载NoMachine安装包,打开安装,等待进度条结束,点击Finish,最后还需要重启下电脑

连接Jetson Nano
-
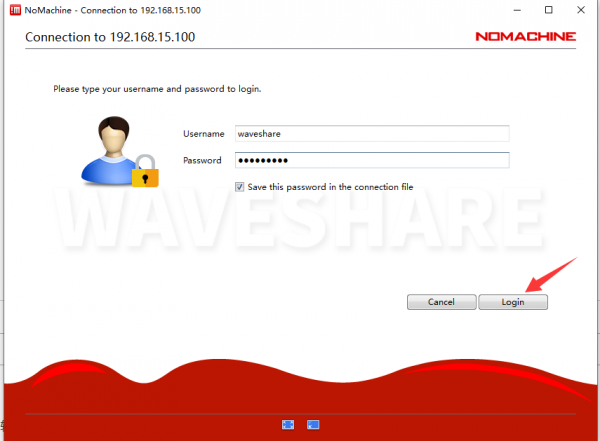
打开NoMachine,在Search输入Jetson TX2 NX的IP地址。例如:192.168.15.100

- 点击Connect to new host 192.168.15.100,输人Jetson TX2 NX登录名和登录密码,点击login
- 加载完成后,会出现一些软件介绍界面,我们直接点击ok就可以了

- 此时我们就成功登录Jetson TX2 NX




VNC登录
- 在没有显示屏的情况下,想要进入Jetson TX2 NX的桌面,此时就需要使用远程桌面登陆。(建议使用显示屏,VNC有一定延时)
配置VNC服务器
- Jetson Nano使用vino来作为默认的VNC服务器,但是默认的设置需要进行一些修改。
- 配置VNC Server
gsettings set org.gnome.Vino require-encryption false gsettings set org.gnome.Vino prompt-enabled false gsettings set org.gnome.Vino authentication-methods "['vnc']" gsettings set org.gnome.Vino lock-screen-on-disconnect false gsettings set org.gnome.Vino vnc-password $(echo -n "mypassword"|base64)
- 需要注意的是,不要用sudo来运行上面的命令,mypassword就是连接VNC的密码。
- 设置桌面开机自启,在.config路径下新建一个自启文件
mkdir -p .config/autostart sudo vim ~/.config/autostart/vino-server.desktop
添加以下内容:
[Desktop Entry] Type=Application Name=Vino VNC server Exec=/usr/lib/vino/vino-server NoDisplay=true
- 查看当前用的是什么管理器
cat /etc/X11/default-display-manager
- 编辑文件
sudo vim /etc/gdm3/custom.conf
- 把下面三行的注释去掉,其中AutomaticLogin行修改成自己的用户名。
WaylandEnable=false AutomaticLoginEnable = true AutomaticLogin = waveshare
- 重启Jetson Nano
sudo reboot
下载安装VNC Viewer
- 在电脑上下载安装VNC-Viewer。
使用VNC Viewer远程连接Jetson Nano
- 打开VNC Viewer,输入Jetson TX2 NX的IP地址回车确认。例如:
192.168.15.102
- 输入前面设置的VNC登录密码,点击ok:
- 此时就成功登录Jetson TX2 NX了。


Linux操作基础
常见指令介绍
文件系统
sudo
- sudo命令以系统管理者的身份执行指令。
- 要想使用root用户,可使用waveshare用户登录,执行下面命令
sudo su #切换为超级用户 su waveshare #切换普通用户
ls
- ls命令用于显示指定工作目录下之内容(列出目前工作目录所含之文件及子目录)。
- 常用的指令:
ls ls -a #显示所有文件及目录 (. 开头的隐藏文件也会列出) ls -l #除文件名称外,亦将文件型态、权限、拥有者、文件大小等资讯详细列出 ls -lh #文件大小以容易理解的格式列出,例如4K
- 想要学习了解指令更多参数,我们可以使用help指令来查看:
ls --help
chmod
- chmod命令是控制用户对文件的权限的命令。
- Linux/Unix 的文件调用权限分为三级 : 文件所有者(Owner)、用户组(Group)、其它用户(Other Users)。
- 在下图中,显示了Linux根目录下的详细文件信息。在这些文件信息中, 最重要的就是第一列,它详细描述了文件和目录的权限,而第三与第四列则显示了这个文件和目录属于哪一个用户或组。
- Linux的文件属性可以分为三种:只读(r)、写(w)和可执行(x)。但是上面的文件属性却分为10小格,这是因为除了第一格显示目录外,另外三组每组三格分别表示文件所有者权限、同一组内的权限以及其他用户权限。
- 第一栏中如果显示d,则表示这是一个目录;如果是链接文件,则在这里显示l;如果是设备文件,则显示c。
- 第一个rwx栏位:-rwx------ 表示文件拥有者所拥有的权限。
- 第二个rwx栏位:---rwx--- 表示同一工作组内用户权限。
- 第三个rwx栏位:------rwx 表示其他用户权限。
- 例如:
- -rwx rwx rwx 表示无论哪个用户都可以对这个文件读写与执行。
- -rw- --- --- 表示只有文件拥有者有读写权限,但是没有执行权限。
- -rw -rw -rw 表示所有用户都有读写权。
- 符号模式
-
who(用户类型)
who 用户类型 说明 u user 文件所有者 g group 文件所有者所在组 o others 所有其他用户 a all 所用用户, 相当于 ugo
-
operator(符号模式表)
Operator 说明 + 为指定的用户类型增加权限 - 去除指定用户类型的权限 = 设置指定用户权限的设置,即将用户类型的所有权限重新设置
-
permission 的符号模式表
模式 名字 说明 r 读 设置为可读权限 w 写 设置为可写权限 x 执行权限 设置为可执行权限 X 特殊执行权限 只有当文件为目录文件,或者其他类型的用户有可执行权限时,才将文件权限设置可执行 s setuid/gid 当文件被执行时,根据who参数指定的用户类型设置文件的setuid或者setgid权限 t 粘贴位 设置粘贴位,只有超级用户可以设置该位,只有文件所有者u可以使用该位
-
符号模式实例
- 给file的所有用户增加读权限
chmod a+r file
- 删除file的所有用户的执行权限
chmod a-x file
- 给file的所有用户增加读写权限
chmod a+rw file
- 给file的所有用户增加读写执行权限
chmod +rwx file
- 对file的所有者设置读写权限,清空该用户组和其他用户对file的所有权限(空格代表无权限)
chmod u=rw,go= file
- 对目录waveshare和其子目录层次结构中的所有文件给用户增加读权限,而对用户组和其他用户删除读权限
chmod -R u+r,go-r waveshare
- 给file的所有用户增加读权限
-
who(用户类型)
- 八进制语法
-
chmod命令可以使用八进制数来指定权限。文件或目录的权限位是由9个权限位来控制,每三位为一组,它们分别是文件所有者(User)的读、写、执行,用户组(Group)的读、写、执行以及其它用户(Other)的读、写、执行。
# 权限 rwx 二进制 7 读 + 写 + 执行 rwx 111 6 读 + 写 rw- 110 5 读 + 执行 rwx 101 4 只读 r-- 100 3 写 + 执行 -wx 011 2 只写 -w- 010 1 只执行 --x 001 0 无 --- 000
-
例如:765的解释如下:
- 所有者的权限用数字表达:属主的那三个权限位的数字加起来的总和。如 rwx ,也就是 4+2+1 ,应该是 7。
- 用户组的权限用数字表达:属组的那个权限位数字的相加的总和。如 rw- ,也就是 4+2+0 ,应该是 6。
- 其它用户的权限数字表达:其它用户权限位的数字相加的总和。如 r-x ,也就是 4+0+1 ,应该是 5。
-
常用的数字权限
- 400 -r-------- 拥有者能够读,其他任何人不能进行任何操作;
- 644 -rw-r–r-- 拥有者都能够读,但只有拥有者可以编辑;
- 660 -rw-rw---- 拥有者和组用户都可读和写,其他人不能进行任何操作;
- 664 -rw-rw-r-- 所有人都可读,但只有拥有者和组用户可编辑;
- 700 -rwx------ 拥有者能够读、写和执行,其他用户不能任何操作;
- 744 -rwxr–r-- 所有人都能读,但只有拥有者才能编辑和执行;
- 755 -rwxr-xr-x 所有人都能读和执行,但只有拥有者才能编辑;
- 777 -rwxrwxrwx 所有人都能读、写和执行(该设置不建议使用)。
-
实例
- 给file的所有用户增加读权限,拥有者和组用户可编辑权限
sudo chmod 664 file
- 给file的所有用户增加读权限,拥有者和组用户可编辑权限
-
chmod命令可以使用八进制数来指定权限。文件或目录的权限位是由9个权限位来控制,每三位为一组,它们分别是文件所有者(User)的读、写、执行,用户组(Group)的读、写、执行以及其它用户(Other)的读、写、执行。

touch
- touch命令用于修改文件或者目录的时间属性,包括存取时间和更改时间。若文件不存在,系统会建立一个新的文件。
- 例如,在当前目录下,使用该指令创建一个空白文件"file.txt",输入如下命令:
touch file.txt
mkdir
- mkdir命令用于创建目录。
-
在工作目录下,建立一个名为waveshare的子目录 :
sudo mkdir waveshare
-
在工作目录下建立一个名为waveshare/test的目录。
sudo mkdir -p waveshare/test
- 若waveshare目录原本不存在,则建立一个。(注:本例若不加 -p 参数,且原本 waveshare 目录不存在,则产生错误。)
cd
- 切换当前工作目录。
cd .. #返回上一层目录 cd /home/waveshare #进入/home/waveshare 目录 cd #返回用户目录
cp
- cp命令主要用于复制文件或目录。
-
参数:
- -a:此选项通常在复制目录时使用,它保留链接、文件属性,并复制目录下的所有内容。其作用等于dpR参数组合。
- -d:复制时保留链接。这里所说的链接相当于 Windows 系统中的快捷方式。
- -f:覆盖已经存在的目标文件而不给出提示。
- -i:与 -f 选项相反,在覆盖目标文件之前给出提示,要求用户确认是否覆盖,回答y时目标文件将被覆盖。
- -p:除复制文件的内容外,还把修改时间和访问权限也复制到新文件中。
- -r:若给出的源文件是一个目录文件,此时将复制该目录下所有的子目录和文件。
- -l:不复制文件,只是生成链接文件。
-
使用指令cp将当前目录test/下的所有文件复制到新目录 newtest 下,输入如下命令:
sudo cp –r test/ newtest
mv
- mv命令用来为文件或目录改名、或将文件或目录移入其它位置。
-
参数:
- -b: 当目标文件或目录存在时,在执行覆盖前,会为其创建一个备份。
- -i: 如果指定移动的源目录或文件与目标的目录或文件同名,则会先询问是否覆盖旧文件,输入y表示直接覆盖,输入n表示取消该操作。
- -f: 如果指定移动的源目录或文件与目标的目录或文件同名,不会询问,直接覆盖旧文件。
- -n: 不要覆盖任何已存在的文件或目录。
- -u:当源文件比目标文件新或者目标文件不存在时,才执行移动操作。
-
使用指令mv将当前目录test/下的file1文件复制到新目录/home/waveshare下,输入如下命令:
sudo mv file1 /home/waveshare
rm
- rm命令用于删除一个文件或者目录。
-
参数:
- -i 删除前逐一询问确认。
- -f 即使原档案属性设为唯读,亦直接删除,无需逐一确认。
- -r 将目录及以下之档案亦逐一删除。
-
- 删除文件可以直接使用rm命令,若删除目录则必须配合选项"-r",例如:
sudo rm test.txt
- rm:是否删除 一般文件 "test.txt"? y
sudo rm homework
- rm: 无法删除目录"homework": 是一个目录
sudo rm -r homework
- rm:是否删除 目录 "homework"? y
reboot
- reboot命令用于用来重新启动计算机,更改Tinker Board 2的配置经常需要重启。
-
参数:
- -n : 在重开机前不做将记忆体资料写回硬盘的动作
- -w : 并不会真的重开机,只是把记录写到 /var/log/wtmp 档案里
- -d : 不把记录写到 /var/log/wtmp 档案里(-n 这个参数包含了 -d)
- -f : 强迫重开机,不呼叫 shutdown 这个指令
- -i : 在重开机之前先把所有网络相关的装置先停止
-
重新启动
sudo reboot
shutdown
- Jetson Nano的关机是不能直接拔掉电源线的,因为Tinker Board 2会将内存作为暂存区,如果直接拔掉电源线会使一些在内存中的数据没有来得及写入SD卡中,从而造成数据的丢失或是损坏SD卡上的数据,造成系统无法启动。
-
参数
- -t seconds : 设定在几秒钟之后进行关机程序。
- -k : 并不会真的关机,只是将警告讯息传送给所有使用者。
- -r : 关机后重新开机。
- -h : 关机后停机。
- -n : 不采用正常程序来关机,用强迫的方式杀掉所有执行中的程序后自行关机。
- -c : 取消目前已经进行中的关机动作。
- -f : 关机时,不做 fsck 动作(检查 Linux 档系统)。
- -F : 关机时,强迫进行 fsck 动作。
- time : 设定关机的时间。
- message : 传送给所有使用者的警告讯息。
- 实例
- 立即关机
sudo shutdown -h now
- 指定 10 分钟后关机
sudo shutdown -h 10
- 重新启动计算机
sudo shutdown -r now
pwd
- 该pwd命令显示当前工作目录的名称:在Jetson nano上,输入pwd将输出类似/home/waveshare。
head
-
该head命令显示文件的开头。可用于-n指定要显示的行数(默认为 10 行),或与-c指定字节数。
head test.py -n 5
tail
- 该tail显示文件的结尾。-c字节或-n行数指定文件中的起始点
df
-
用于df显示已安装文件系统上可用和使用的磁盘空间。用于df -h以可读的格式查看输出,使用 M 表示 MB,而不是显示字节数。
df -h
tar
- tar命令是用来建立,还原备份文件的工具程序,它可以加入,解开备份文件内的文件。
-
压缩文件:
tar -cvzf waveshare.tar.gz *
-
解压文件:
tar -xvzf waveshare.tar.gz
apt
- apt(Advanced Packaging Tool)是一个在 Debian 和 Ubuntu 中的 Shell 前端软件包管理器。
- apt 命令提供了查找、安装、升级、删除某一个、一组甚至全部软件包的命令,而且命令简洁而又好记。
- apt 命令执行需要超级管理员权限(root)。
- apt 常用命令
- 列出所有可更新的软件清单命令:sudo apt update
- 升级软件包:sudo apt upgrade
- 列出可更新的软件包及版本信息:apt list --upgradeable
- 升级软件包,升级前先删除需要更新软件包:sudo apt full-upgrade
- 安装指定的软件命令:sudo apt install <package_name>
- 安装多个软件包:sudo apt install <package_1> <package_2> <package_3>
- 更新指定的软件命令:sudo apt update <package_name>
- 显示软件包具体信息,例如:版本号,安装大小,依赖关系等等:sudo apt show <package_name>
- 删除软件包命令:sudo apt remove <package_name>
- 清理不再使用的依赖和库文件: sudo apt autoremove
- 移除软件包及配置文件: sudo apt purge <package_name>
- 查找软件包命令: sudo apt search <keyword>
- 列出所有已安装的包:apt list --installed
- 列出所有已安装的包的版本信息:apt list --all-versions
- 例如我们安装nano编辑器
sudo apt install nano
网络
ifconfig
- 用于在不带任何参数(即)ifconfig运行时显示当前系统上接口的网络配置详细信息。
- 用SSH连接时可以通过ifconfig查找IP地址,终端输入
ifconfig
- 查看有线网络IP地址,终端输入
ifconfig eth0
- 查看无线网络IP地址,终端输入
ifconfig wlan0
hostname
- 该hostname命令显示系统的当前主机名。我们使用Jetson Nano的时候经常需要使用远程工具,而默认的网络配置IP地址采用动态分配,会造成IP地址不确定的问题
- 当我们的Jetson Nano的IP地址发生变化时,可以使用主机名登录。
-
登录Jetson Nano,修改hosts文件,命令如下:
sudo vim /etc/hosts
- 将jp46替换成要修改的名字,例如waveshare,按下键盘ZZ保存、退出:

-
修改hostname文件,将这里jp46也替换成要修改的名字,例如waveshare,按下键盘ZZ:
sudo vim /etc/hostname

- 修改完成重启Jetson Nano即可:
sudo reboot
- 我们也可以使用如下命令查看IP地址:
hostname -I


Vim编辑器使用
- Vim编辑器是所有Unix及Linux系统下标准的编辑器,它的强大不逊色于任何最新的文本编辑器,这里只是简单地介绍一下它的用法和常用命令。
- 基本上 vim 共分为三种模式,分别是命令模式(Command mode),输入模式(Insert mode)和底线命令模式(Last line mode)。
- 命令模式:控制屏幕光标的移动,字符、字或行的删除,移动复制某区段。
- 输入模式:在此模式下输入字符,编辑文件。
- 底线模式:将文件保存或退出vim,也可以设置编辑环境,如寻找字符串、列出行号等。
- 我们可以将这三个模式想成底下的图标来表示:

- 首先删除默认Vi编辑器
sudo apt-get remove vim-common
- 然后重装Vim
sudo apt-get install vim
- 为方便使用还得在/etc/vim/vimrc文件后面添加下面三句
set nu #显示行号 syntax on #语法高亮 set tabstop=4 #tab退四格
常用命令
- 打开文件、保存、关闭文件(vi命令模式下使用)
vim filename //打开filename文件 :w //保存文件 :q //退出编辑器,如果文件已修改请使用下面的命令 :q! //退出编辑器,且不保存 :wq //退出编辑器,且保存文件 :wq! //强制退出编辑器,且保存文件 ZZ //退出编辑器,且保存文件 ZQ //退出编辑器,且不保存 - 插入文本或行(vi命令模式下使用,执行下面命令后将进入插入模式,按ESC键可退出插入模式)
a //在当前光标位置的右边添加文本 i //在当前光标位置的左边添加文本 A //在当前行的末尾位置添加文本 I //在当前行的开始处添加文本(非空字符的行首) O //在当前行的上面新建一行 o //在当前行的下面新建一行 R //替换(覆盖)当前光标位置及后面的若干文本 J //合并光标所在行及下一行为一行(依然在命令模式)
- 删除、恢复字符或行(vi命令模式下使用)
x //删除当前字符 nx //删除从光标开始的n个字符 dd //删除当前行 ndd //向下删除当前行在内的n行 u //撤销上一步操作 U //撤销对当前行的所有操作
-
复制、粘贴(vi命令模式下使用)
yy //将当前行复制到缓存区 nyy //将当前行向下n行复制到缓冲区 yw //复制从光标开始到词尾的字符 nyw //复制从光标开始的n个单词 y^ //复制从光标到行首的内容 y$ //复制从光标到行尾的内容 p //粘贴剪切板里的内容在光标后 P //粘贴剪切板里的内容在光标前
配置
文件传输
- 本教程以Windows系统远程连接到Linux服务器为例,有多种方式可以把本地的文件上传到服务器。
MobaXterm文件传输
- 使用MobaXterm工具传输文件是非常简单、方便的
- 将文件从Windows传输到树莓派只需拖动文件到MobaXterm左边目录里即可
- 同理,将树莓派文件传输到Windows,只需拖动MobaXterm左边目录里文件到Windows即可。

NoMachine文件传输
- 当使用NoMachine远程连接成功后,Jetson Nano桌面右上角会出现NoMachine图标,我们点击图标,选择Transfer a file
- Upload file from the client是将文件从Windows电脑传输到Jetson Nano上
- Download file from the server是将文件从Jetson Nano传输到Windows电脑上
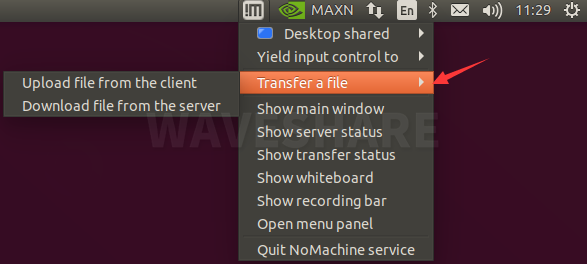

SCP文件传输
- SCP命令可用于跨Linux系统安全地复制或加密传输文件和目录。
- 格式:
scp +参数 +用户名/登陆名+@+主机名/IP地址+ : + 目标文件路径+本地存放路径
- 首先进入要存放文件的目录按住键盘Shift且右键空白处,打开Windows PowerShell
-
将file文件从Jetson Nano复制到本地Windows,在终端输入
scp waveshare@192.168.15.100:file .
其中“.”表示当前路径
-
将file文件从本地Windows复制到Jetson Nano,在终端输入
scp file waveshare@192.168.15.100:
-
将file文件夹从Jetson Nano复制到本地Windows,由于file是一个目录,就需要加上参数r,在终端输入
scp -r waveshare@192.168.15.100:/home/pi/file .
-
将file文件夹从本地Windows复制到Jetson Nano,在终端输入
scp -r file waveshare@192.168.15.100:
注意:以上的waveshare需要改成你的系统的用户名,IP地址改成Jetson Nano实际IP地址。
文件共享(Samba)
使用Samba服务可实现文件共享。在windows的网上邻居即可访问Jetson TX2 NX文件系统,非常方便。
-
首先安装Samba,在终端输入
sudo apt-get update sudo apt-get install samba -y
- 在/home/waveshare目录下创建共享文件夹sambashare
mkdir sambashare
-
安装完成后,修改配置文件/etc/samba/smb.conf:
sudo nano /etc/samba/smb.conf
拉到文件的最后,将下面的语句添加到文件尾部
[sambashare] comment = Samba on JetsonNano path = /home/waveshare/sambashare read only = no browsable = yes
注意:这里的waveshare需要改成你的系统的用户名。也就是说path是你要设置的共享文件夹路径。
-
重启Samba服务
sudo service smbd restart
-
设置共享文件夹密码
sudo smbpasswd -a waveshare
注意:这里的username需要改成你系统的用户名,如果不是用户名就会失败。
这里会要求设置Samba密码,建议是直接用你的系统的密码,比较方便记忆 -
设置完成之后,在你的电脑端,打开文件管理器
\\192.168.15.100\sambashare
-
输入登录名和前面第5步设置的密码
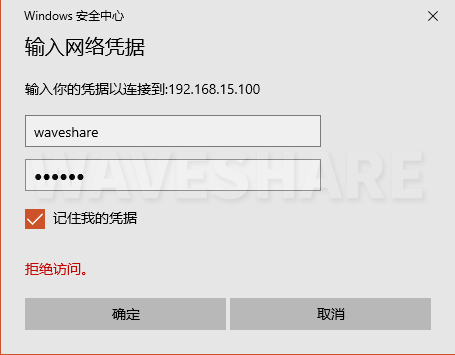
- 我们来验证下,在windows新建test文件夹,在Jetson TX2 NX sambashare目录下就可以看到test文件夹





摄像头
查看接入的第一个摄像头画面:
nvgstcapture-1.0
查看接入的第二个摄像头画面:
nvgstcapture-1.0 --sensor-id=1
AI入门
- 本教程基于JetPack4.6系统镜像,Python版本为Python3.6,TensorFlow版本为2.5.0,Pytorch版本为1.9.0为例。
- 注意:TensorFlow版本和Pytorch版本一定要和JetPack版本相互对应。
PIP安装
- Jetson Nano中默认安装了 Python3.6 版本,直接安装PIP
sudo apt update sudo apt-get install python3-pip python3-dev
- 安装完成后我们查看PIP版本
pip3 -V

- 默认安装的PIP是 9.01 版本,需要把它升级到最新版
python3 -m pip install --upgrade pip

- 升级成功后,查看pip版本信息,发现有些问题
pip3 -V
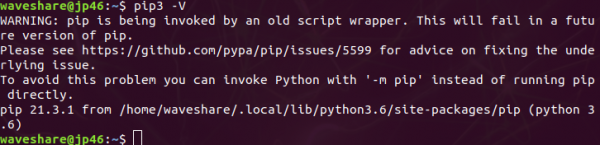
- 我们使用命令如下解决
python3 -m pip install --upgrade --force-reinstall pip sudo reboot

- 安装机器学习领域重要的安装包
安装机器学习领域重要的包 sudo apt-get install python3-numpy sudo apt-get install python3-scipy sudo apt-get install python3-pandas sudo apt-get install python3-matplotlib sudo apt-get install python3-sklearn




设置CUDA环境
- 查看CUDA版本,出现command not found,需要配置下环境
nvcc -V cat /usr/local/cuda/version.txt

注意:这里使用cat命令查看不到版本,进入/usr/local/目录查看下是否有CUDA目录,
如果没有参考后面未安装CUDA部分安装CUDA,安装完成后再配置环境。 - 设置环境变量
sudo vim .bashrc 在文件末尾加入: export PATH=/usr/local/cuda-10.2/bin:$PATH export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-10.2

- 更新环境变量
source .bashrc
- 再次查看CUDA版本
nvcc -V




Tensorflow GPU环境搭建
- 安装所需要的包
sudo apt-get install libhdf5-serial-dev hdf5-tools libhdf5-dev zlib1g-dev zip libjpeg8-dev liblapack-dev libblas-dev gfortran sudo pip3 install -U pip testresources setuptools==49.6.0
-
安装 python 的依赖项
sudo pip3 install -U --no-deps numpy==1.19.4 future==0.18.2 mock==3.0.5 keras_preprocessing==1.1.2 keras_applications==1.0.8 gast==0.4.0 protobuf pybind11 cython pkgconfig packaging sudo env H5PY_SETUP_REQUIRES=0 pip3 install -U h5py==3.1.0
- 安装Tensorflow(在线安装经常失败,可以参考第4步离线安装)
sudo pip3 install --pre --extra-index-url https://developer.download.nvidia.com/compute/redist/jp/v46 tensorflow
-
最后建议离线安装,先登录英伟达官网下载TensorFlow安装包(以jetpack4.6 TensorFlow2.5.0 nv21.08为例,建议使用火狐浏览器下载)

pip3 install tensorflow-2.5.0+nv21.8-cp36-cp36m-linux_aarch64.whl
- 安装完成后,检查是否安装成功,在终端输入
python3 import tensorflow as tf

- 查看版本信息
tf.__version__




Pytorch环境搭建
Pytorch安装
- 首先登录英伟达官网下载Pytorch安装包,我们以PyTorch v1.9.0为例

- 下载依赖库
sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev libopenblas-base libopenmpi-dev
- 安装Pytorch
sudo pip3 install torch-1.9.0-cp36-cp36m-linux_aarch64.whl
- 验证Pytorch是否安装成功
python3 import torch x = torch.rand(5, 3) print(x)

- 查看版本信息
import torch print(torch.__version__)
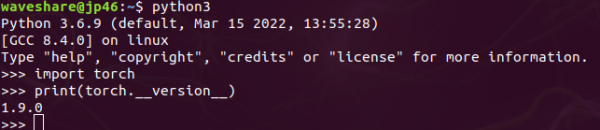



Torchvision安装
- Torchvision版本要与Pytorch版本相匹配,我们前面安装的Pytorch版本为1.9.0,Torchvision安装 v0.10.0版本
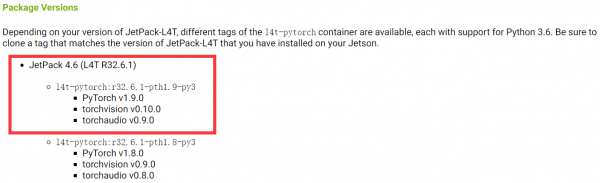
- 下载、安装torchvision
git clone --branch v0.10.0 https://github.com/pytorch/vision torchvision cd torchvision export BUILD_VERSION=0.10.0 sudo python3 setup.py install
- 验证Torchvision是否安装成功
python3 import torchvision

- 出现报错可能是Pillow版本太高,卸载重装
sudo pip3 uninstall pillow sudo pip3 install pillow

- 查看版本信息
import torchvision print(torchvision.__version__)



Yolo V4环境搭建
- 首先在github上下载darknet
git clone https://github.com/AlexeyAB/darknet.git
- 下载完成后,需要修改下Makefile文件
cd darknet sudo vim Makefile
将前四行0改成1
GPU=1 CUDNN=1 CUDNN_HALF=1 OPENCV=1
- cuda版本和路径也要改成我们的实际版本和路径,否则会编译失败
将NVCC=nvcc修改为 NVCC=/usr/local/cuda-10.2/bin/nvcc
- 修改完成后进行编译,在终端输入
sudo make
- 基本的推理方法有三种:图片、视频、摄像头 ( 实时影像 )
- 选择Yolo v4和Yolo v4-tiny(更轻量化的模型,适合在Jetson Nano上运行)进行测试。首先需要下载已训练好的模型权重文件
- 测试
./darknet detector test cfg/coco.data cfg/yolov4.cfg yolov4.weights data/dog.jpg

- 如果要开启图片的话需使用 test模式,他会在执行之后要你输入图片的位置
./darknet detector test ./cfg/coco.data ./cfg/yolov4.cfg ./yolov4.weights
- Yolov4-tiny 视频的检测(github下来的data里面并没有该视频文件,需要用户自行上传要检测的视频文件到 data 文件夹下)
./darknet detector demo cfg/coco.data cfg/yolov4-tiny.cfg yolov4-tiny.weights data/xxx.mp4
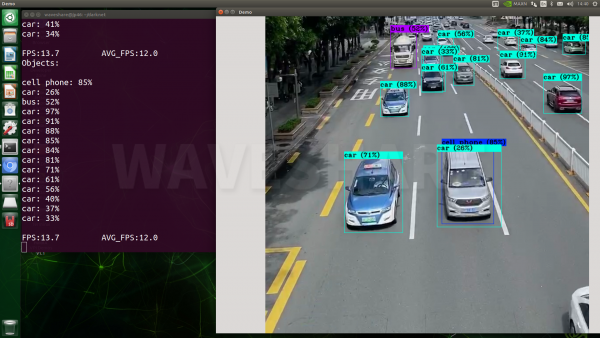
帧数大约是14帧 - 查看USB摄像头的设备号
ls /dev/video* ./darknet detector demo cfg/coco.data cfg/yolov4-tiny.cfg yolov4-tiny.weights /dev/video0 "nvarguscamerasrc ! video/x-raw(memory:NVMM), width=1280, height=720, format=NV12, framerate=30/1 ! nvvidconv ! video/x-raw, width=1280, height=720, format=BGRx ! videoconvert ! video/x-raw, format=BGR ! appsink" ./darknet detector demo cfg/coco.data cfg/yolov4.cfg yolov4.weights /dev/video0 "nvarguscamerasrc ! video/x-raw(memory:NVMM), width=1280, height=720, format=NV12, framerate=30/1 ! nvvidconv ! video/x-raw, width=1280, height=720, format=BGRx ! videoconvert ! video/x-raw, format=BGR ! appsink"
- Hello AI World项目集成了NVIDIA非常强大的 TensroRT 加速引擎,将性能提升了数倍以上。
- 安装cmake
sudo apt-get update sudo apt-get install git cmake libpython3-dev python3-numpy
- 获取jetson-inference开源项目
git clone https://github.com/dusty-nv/jetson-inference cd jetson-inference git submodule update --init
-
新建文件夹,编译
注意:编译不报错才能正常运行下面的示例。sudo mkdir build cd build sudo cmake ../
由于内容是外网上的,可能导致下载不了box.com上的文件,所以下载模型和Pytorch界面我们选择跳过(Quit和Skip)。
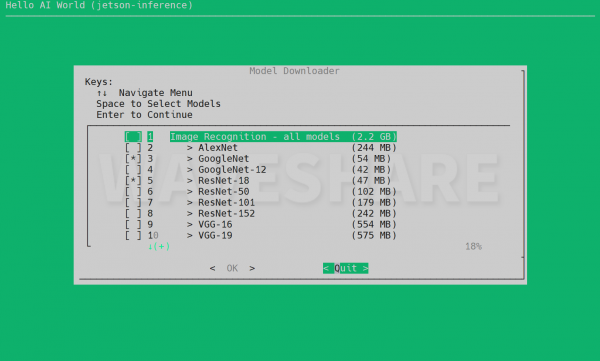
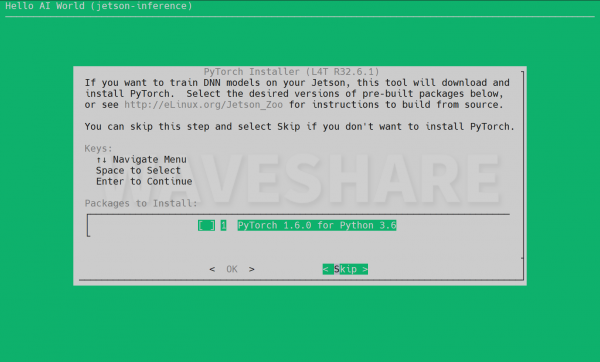
-
下载模型,然后再放置到jetson-inference/data/networks目录下,然后解压,为了方便用户,这里我们提供部分模型参考下载指令:
cd ~/jetson-inference/data/networks/ #如果你需要下载更多的算法,请参考这里的方法,首先在github上获取model的下载地址,然后用wget 加指令下载。这里下载三个model以作参考 wget https://github.com/dusty-nv/jetson-inference/releases/download/model-mirror-190618/facenet-120.tar.gz wget https://github.com/dusty-nv/jetson-inference/releases/download/model-mirror-190618/GoogleNet.tar.gz wget https://github.com/dusty-nv/jetson-inference/releases/download/model-mirror-190618/SSD-Mobilenet-v2.tar.gz #下面的指令是解压前面下载的model的,只有解压出来才能用 tar -zxvf facenet-120.tar.gz tar -zxvf GoogleNet.tar.gz tar -zxvf SSD-Mobilenet-v2.tar.gz
-
也可以使用U盘或者文件传输方式将文件复制到Jetson Nano中
cd jetson-inference/build sudo make sudo make install
-
安装v4l摄像头驱动,终端输入
sudo apt-get install v4l-utils v4l2-ctl --list-formats-ext
- 使用摄像头对环境物体进行识别
cd ~/jetson-inference/build/aarch64/bin/ ./detectnet-camera
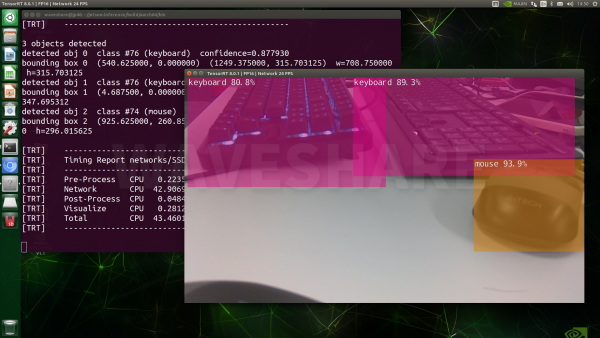
使用TensorRT加速帧率达到24帧。 -
下面是可供下载的预训练对象检测网络表,以及用于加载预训练模型的相关--network参数:
./detectnet-camera --network=facenet #运行使用面部识别网络 ./detectnet-camera --network=multiped #运行使用多级行人/行李探测器 ./detectnet-camera --network=pednet #运行使用原始单级行人探测器 ./detectnet-camera --network=coco-bottle #在摄像头下检测 瓶/汽水罐 ./detectnet-camera --network=coco-dog #在摄像头下检测狗
-
让我们使用detectnet程序在静态图像中定位对象。除了输入/输出路径之外,还有一些额外的命令行选项:
- 更改正在使用的检测模型的可选--network标志(默认为 SSD-Mobilenet-v2)。
- --overlay标志,可以是逗号分隔的box, lines, labels, conf, 和none
- 默认--overlay=box,labels,conf显示框、标签和置信度值
- 该box选项绘制填充的边界框,而lines仅绘制未填充的轮廓
- --alpha值,设置覆盖期间使用的 alpha 混合值(默认值为120)。
- --threshold设置检测的最小阈值的可选值(默认为0.5)。
- --camera 标志设置要使用的摄像头设备
- 默认为使用 MIPI CSI 传感器 0(--camera=0)
- --width 和--height 标志设置相机分辨率(默认为 1280x720)
- 分辨率应设置为相机支持的格式,使用v4l2-ctl --list-formats-ext查询
./detectnet-camera --network=facenet #使用 FaceNet,默认 MIPI CSI 相机(1280×720) ./detectnet-camera --camera=/dev/video1 --network=facenet #使用 PedNet,V4L2 摄像机/dev/video1(1280x720) ./detectnet-camera --width=640 --height=480 --network=facenet #使用 PedNet,默认 MIPI CSI 摄像机(640x480)
- Jetson TX1、TX2、AGX Xavier 和 Nano 开发板包含一个 40 针 GPIO 接头,类似于 Raspberry Pi 中的 40 针接头。
- 可以使用 Jetson GPIO 库包中提供的 Python 库来控制这些 GPIO 的数字输入和输出。
- Jetson GPIO 库提供了 RPi.GPIO 库提供的所有公共 API。下面讨论每个 API 的使用:
- 要导入 Jetson.GPIO 模块,请使用:
import Jetson.GPIO as GPIO
- 管脚编号
- Jetson GPIO 库提供了四种对 I/O 引脚进行编号的方法。
- 前两个对应RPi.GPIO库提供的模式,即BOARD和BCM,分别指的是40针GPIO头的针号和Broadcom SoC GPIO号。
- 其余两种模式,CVM 和 TEGRA_SOC 使用字符串而不是数字,分别对应于 CVM/CVB 连接器和 Tegra SoC 上的信号名称。
- 要指定您使用的模式(强制),请使用以下函数调用:
GPIO.setmode(GPIO.BOARD) GPIO.setmode(GPIO.BCM) GPIO.setmode(GPIO.CVM) GPIO.setmode(GPIO.TEGRA_SOC)
- 要检查已设置的模式,您可以调用:
mode = GPIO.getmode()
模式必须是 GPIO.BOARD、GPIO.BCM、GPIO.CVM、GPIO.TEGRA_SOC 或 None 之一。
-
如果GRIO检测到一个引脚已经被设置成了非默认值,那么你将看到一个警告信息。
- 你可以通过下列代码禁用警告:
GPIO.setwarnings(False)
- 你可以通过下列代码禁用警告:
-
设置频道
- GPIO 通道必须在用作输入或输出之前进行设置。要将通道配置为输入,请调用:
# (where channel is based on the pin numbering mode discussed above) GPIO.setup(channel, GPIO.IN)
- 要将通道设置为输出,请调用:
GPIO.setup(channel, GPIO.OUT)
- 也可以为输出通道指定一个初始值:
GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH)
- 将通道设置为输出时,也可以同时设置多个通道:
# add as many as channels as needed. You can also use tuples: (18,12,13) channels = [18, 12, 13] GPIO.setup(channels, GPIO.OUT)
- GPIO 通道必须在用作输入或输出之前进行设置。要将通道配置为输入,请调用:
-
输入
- 要读取通道的值,请使用:
GPIO.input(channel) 这将返回 GPIO.LOW 或 GPIO.HIGH。
- 要读取通道的值,请使用:
-
输出
- 要设置配置为输出的引脚的值,请使用:
GPIO.output(channel, state) 其中状态可以是 GPIO.LOW 或 GPIO.HIGH。
- 您还可以输出到通道列表或元组:
channels = [18, 12, 13] # or use tuples GPIO.output(channels, GPIO.HIGH) # or GPIO.LOW # set first channel to LOW and rest to HIGH GPIO.output(channel, (GPIO.LOW, GPIO.HIGH, GPIO.HIGH))
- 要设置配置为输出的引脚的值,请使用:
-
清理
- 在程序结束时,最好清理通道,以便将所有引脚设置为默认状态。要清理所有使用的通道,请调用:
GPIO.cleanup()
- 如果您不想清理所有频道,也可以清理单个频道或频道列表或元组:
GPIO.cleanup(chan1) # cleanup only chan1 GPIO.cleanup([chan1, chan2]) # cleanup only chan1 and chan2 GPIO.cleanup((chan1, chan2)) # does the same operation as previous statement
- 在程序结束时,最好清理通道,以便将所有引脚设置为默认状态。要清理所有使用的通道,请调用:
-
Jetson Board 信息和库版本
- 要获取有关 Jetson 模块的信息,请使用/阅读:
GPIO.JETSON_INFO
这提供了一个带有以下键的 Python 字典:P1_REVISION、RAM、REVISION、TYPE、MANUFACTURER 和 PROCESSOR。字典中的所有值都是字符串,但 P1_REVISION 是一个整数。
- 要获取有关库版本的信息,请使用/阅读:
GPIO.VERSION
这提供了一个具有 XYZ 版本格式的字符串。
- 要获取有关 Jetson 模块的信息,请使用/阅读:
-
中断
-
除了忙轮询之外,该库还提供了三种额外的方法来监视输入事件:
- wait_for_edge() 函数
- 此函数阻塞调用线程,直到检测到提供的边缘。该函数可以如下调用:
GPIO.wait_for_edge(channel, GPIO.RISING)
- 第二个参数指定要检测的边沿,可以是 GPIO.RISING、GPIO.FALLING 或 GPIO.BOTH。如果您只想将等待限制为指定的时间,可以选择设置超时:
# timeout is in milliseconds GPIO.wait_for_edge(channel, GPIO.RISING, timeout=500)
该函数返回检测到边缘的通道,如果发生超时,则返回 None。 - event_detected() 函数
- 此函数可用于定期检查自上次调用以来是否发生了事件。该函数可以按如下方式设置和调用:
# set rising edge detection on the channel GPIO.add_event_detect(channel, GPIO.RISING) run_other_code() if GPIO.event_detected(channel): do_something()和以前一样,您可以检测 GPIO.RISING、GPIO.FALLING 或 GPIO.BOTH 的事件。 - 检测到边缘时运行的回调函数
- 此功能可用于为回调函数运行第二个线程。因此,回调函数可以与您的主程序并发运行以响应边缘。此功能可按如下方式使用:
# define callback function def callback_fn(channel): print("Callback called from channel %s" % channel) # add rising edge detection GPIO.add_event_detect(channel, GPIO.RISING, callback=callback_fn) - 如果需要,也可以添加多个回调,如下所示:
def callback_one(channel): print("First Callback") def callback_two(channel): print("Second Callback") GPIO.add_event_detect(channel, GPIO.RISING) GPIO.add_event_callback(channel, callback_one) GPIO.add_event_callback(channel, callback_two)在这种情况下,两个回调按顺序运行,而不是同时运行,因为只有线程运行所有回调函数。 - 为了通过将多个事件合并为一个事件来防止多次调用回调函数,可以选择设置去抖动时间:
# bouncetime set in milliseconds GPIO.add_event_detect(channel, GPIO.RISING, callback=callback_fn, bouncetime=200)
- 如果不再需要边缘检测,可以将其删除,如下所示:
GPIO.remove_event_detect(channel)
-
检查GPIO通道功能
-
此功能允许您检查提供的 GPIO 通道的功能:
GPIO.gpio_function(channel) 该函数返回 GPIO.IN 或 GPIO.OUT。
-
此功能允许您检查提供的 GPIO 通道的功能:
- 示例程序
import Jetson.GPIO as GPIO import time as time LED_Pin = 11 GPIO.setwarnings(False) GPIO.setmode(GPIO.BOARD) GPIO.setup(LED_Pin, GPIO.OUT) while (True): GPIO.output(LED_Pin, GPIO.HIGH) time.sleep(0.5) GPIO.output(LED_Pin, GPIO.LOW) time.sleep(0.5)
- 针对jetson.gpio库,官方也提供了一些简单的例程
- 首先下载jetson-gpio:
git clone https://github.com/NVIDIA/jetson-gpio
- 下载完成后,我们就可以使用里面的例程了,例如simple_input.py可以读取引脚的状态
cd /opt/nvidia/jetson-gpio/samples/ sudo python3 simple_input.py
- 首先安装I2Ctool,终端输入:
sudo apt-get update sudo apt-get install -y i2c-tools sudo apt-get install -y python3-smbus
- 检查安装情况,终端输入:
apt-cache policy i2c-tools
输出如下即为安装成功
i2c-tools: 已安装:4.0-2 候选: 4.0-2 版本列表: *** 4.0-2 500 500 http://ports.ubuntu.com/ubuntu-ports bionic/universe arm64 Packages 100 /var/lib/dpkg/status
- 查询i2c设备:
sudo i2cdetect -y -r -a 0
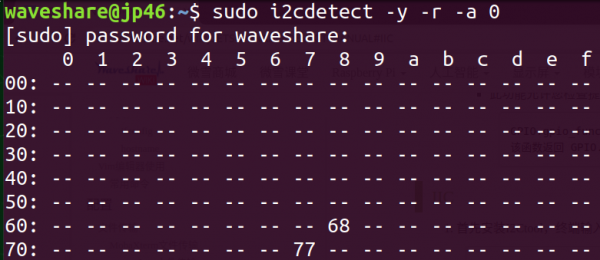
- 参数: -y是无视交互问题直接执行,-r是SMBus read byte命令,-a是所有地址,0是指SMBus 0。
- 扫描寄存器数据:
sudo i2cdump -y 0 0x68
-
寄存器数据写入:
sudo i2cset -y 0 0x68 0x90 0x55
-
参数:
参数 含义 0 代表I2C设备号 0x68 代表I2C设备地址 0x90 代表寄存器地址 0x55 代表向寄存器写入的数据
-
参数:
-
寄存器数据读出:
sudo i2cget -y 0 0x68 0x90
-
参数:
参数 含义 0 代表I2C设备号 0x68 代表I2C设备地址 0x90 代表寄存器地址
-
参数:
- Jetson TX2 NX SOM 数据手册
- Jetson TX2 NX 数据手册
- Jetson TX2 NX 产品设计参考手册
- Jetson TX2 NX 3D 图纸
- Jetson TX2 NX 资料下载路径
使用YOLOv4进行推理
图片测试

视频测试

实时图像测试
Hello AI World
环境搭建


DetectNet运行实时摄像头检测

硬件控制
GPIO
点亮LED灯
例程使用
IIC
i2cdetect

NVIDIA官方资料
软件
技术支持
联系人:张工
邮箱:3004637648@qq.com
QQ:3004637648
微信:扫下方二维码添加
