“Pico-CAN-B”的版本间的差异
(创建空白页面) |
|||
| 第1行: | 第1行: | ||
| + | <div class="wiki-pages pink-color"> | ||
| + | <div class="tabberlive newwsnav" id="wsnavbar"> | ||
| + | <ul class="tabbernav"> | ||
| + | <li class="nav-link">[[#myintro|说明]]</li> | ||
| + | <li class="nav-link">[[#myresources|资料]]</li> | ||
| + | <li class="nav-link">[[#myfaq|FAQ]]</li> | ||
| + | <li class="nav-link">[[#mysupport|售后]]</li> | ||
| + | </ul> | ||
| + | </div> | ||
| + | <div class="tabber"> | ||
| + | {{外围模块|colorscheme=raspberry-pink | ||
| + | |name = Pico-CAN-A | ||
| + | |img=[[File:Pico-CAN-B-1.jpg|360px |alt=Pico-CAN-A|link=https://www.waveshare.net/shop/Pico-CAN-A.htm]] | ||
| + | |category1= RPi Pico | ||
| + | |brand=Waveshare | ||
| + | |feature = CAN | ||
| + | | interface1 = uart | ||
| + | |Pname1 = 主板/套件 | ||
| + | |list1={{Pico-Kits}} | ||
| + | |Pname2 = LCD/OLED/其他显示模块 | ||
| + | |list2={{Pico-LCDs}} | ||
| + | |Pname3 = 扩展模块 | ||
| + | |list3={{Pico-Boards}} | ||
| + | |Pname4 = ePaper系列 | ||
| + | |list4={{Pico-ePapers}} | ||
| + | }} | ||
| + | <div class="tabbertab" title="说明" id="myintro"> | ||
| + | |||
| + | =说明= | ||
| + | |||
| + | |||
| + | ==产品简介== | ||
| + | 专为Raspberry Pi Pico 设计的一款can拓展板,可使 Pico 获得可靠的长距离通信 | ||
| + | |||
| + | ==产品特性== | ||
| + | * 板载 Raspberry Pi Pico 接口,适用于 Raspberry Pi Pico 系列主板 | ||
| + | * 采用 E810-TTL-CAN01 模组,使用 UART 即可完成 CAN 的通信 | ||
| + | * 支持透明转换、透明带标识转换和协议模式转换三种转换方式 | ||
| + | * 提供完善的配套资料手册 (Raspberry Pi Pico C/C++ 和 MicroPython 等示例程序) | ||
| + | |||
| + | ==产品参数== | ||
| + | *工作电压 3.3V | ||
| + | *CAN收发器 E810-TTL-CAN01 | ||
| + | *控制接口 UART | ||
| + | *过通信速率 300~921600bps | ||
| + | *产品尺寸 58× 25mm | ||
| + | |||
| + | ==引脚分布== | ||
| + | [[File:Pico-CAN-A-WIKI1.png|700px]] | ||
| + | |||
| + | ==产品尺寸== | ||
| + | [[File:Pico-CAN-A-WIKI2.png|600px]] | ||
| + | |||
| + | </div> | ||
| + | <div class="tabbertab" title="Pico快速上手"> | ||
| + | {{Pico-get-start}} | ||
| + | </div> | ||
| + | |||
| + | <div class="tabbertab" title="使用"> | ||
| + | =Pico使用教程= | ||
| + | ==硬件连接== | ||
| + | 连接Pico的时候,请注意对应方向不要接反。可以观察模块上有USB丝印的一端与Pico的USB接口一端来判断方向(也可以根据模块上的排母的引脚标号与Pico的引脚标号判断)<br /> | ||
| + | [[File:Pico-CAN-A-5.jpg|600px]] | ||
| + | |||
| + | ==程序下载== | ||
| + | 一:树莓派上直接下载 | ||
| + | 打开树莓派终端,执行:<br /> | ||
| + | <pre> | ||
| + | sudo apt-get install p7zip-full | ||
| + | cd ~ | ||
| + | sudo wget https://www.waveshare.net/w/upload/d/d8/Pico-CAN-A-Code.7z | ||
| + | 7z Pico_Pico-CAN-A-Code.7z -o./Pico-CAN-A-Code.7z | ||
| + | cd ~/Pico-CAN-A-Code | ||
| + | </pre> | ||
| + | 二:在资料栏下点击示例程序直接下载即可<br /> | ||
| + | ==例程使用== | ||
| + | ===python=== | ||
| + | *1.按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。<br/> | ||
| + | *2.下载pico_micropython_xxxxx.uf2 文件,复制到识别的可移动盘(RPI-RP2)中<br/> | ||
| + | [https://www.raspberrypi.org/documentation/rp2040/getting-started/#getting-started-with-micropython 官方固件下载]<br> | ||
| + | *3.打开Thonny IDE(注意:要使用最新版本的Thonny,否则是没有Pico的支持包的,当前Windows下的最新版本为v3.3.3)<br/> | ||
| + | *4.点击工具->设置->解释器,如图所示选择Pico及对应的端口<br/> | ||
| + | [[File:pico-lcd-0.96-img-config.png|800px]]<br/> | ||
| + | *5.文件->打开->servo.py,点击运行即可,如图所示说明程序已经运行: | ||
| + | [[File:pico-lcd-0.96-img-run.png|800px]]<br/> | ||
| + | 这是一个收发例程,请接上其他的CAN设备(A-A B-B连接),实验现象发送字符串SENDTESTABCD1234,接受另一端CAN返回的字符<br/> | ||
| + | </div> | ||
| + | |||
| + | |||
| + | <div class="tabbertab" title="资料" id="myresources"> | ||
| + | |||
| + | =资料= | ||
| + | ==文档== | ||
| + | * [https://www.waveshare.net/w/upload/2/2b/Pico_CAN_A_SCH.pdf 原理图] | ||
| + | * [https://www.waveshare.net/w/upload/c/ca/E810-TTL-CAN01_UserManual_CN_v1.2.pdf E810-TTL-CAN01 数据手册] | ||
| + | ==程序== | ||
| + | * [https://www.waveshare.net/w/upload/d/d8/Pico-CAN-A-Code.7z 示例代码] | ||
| + | |||
| + | {{Raspberry Pi Pico Resources}} | ||
| + | |||
| + | </div> | ||
| + | <div class="tabbertab" title="Pico快速上手"> | ||
| + | {{Pico-get-start}} | ||
| + | </div> | ||
| + | |||
| + | </div> | ||
| + | <div class="tabbertab" title="FAQ" id="myfaq"> | ||
| + | |||
| + | <h1>FAQ</h1> | ||
| + | <br /> | ||
| + | |||
| + | </div> | ||
| + | <div class="tabbertab" title="售后" id="mysupport"> | ||
| + | |||
| + | <h1>技术支持</h1> | ||
| + | <br />{{Service21}}</div> | ||
| + | |||
| + | </div> | ||
2023年2月13日 (一) 11:12的版本
| ||||||||||||||||||||
| ||||||||||||||||||||
说明
产品简介
专为Raspberry Pi Pico 设计的一款can拓展板,可使 Pico 获得可靠的长距离通信
产品特性
- 板载 Raspberry Pi Pico 接口,适用于 Raspberry Pi Pico 系列主板
- 采用 E810-TTL-CAN01 模组,使用 UART 即可完成 CAN 的通信
- 支持透明转换、透明带标识转换和协议模式转换三种转换方式
- 提供完善的配套资料手册 (Raspberry Pi Pico C/C++ 和 MicroPython 等示例程序)
产品参数
- 工作电压 3.3V
- CAN收发器 E810-TTL-CAN01
- 控制接口 UART
- 过通信速率 300~921600bps
- 产品尺寸 58× 25mm
引脚分布

产品尺寸

Pico快速上手
固件下载
| ||
|


文字教程
基础介绍
MicroPython系列
【MicroPython】machine.Pin类函数详解
【MicroPython】machine.PWM类函数详解
【MicroPython】machine.ADC类函数详解
【MicroPython】machine.UART类函数详解
【MicroPython】machine.I2C类函数详解
【MicroPython】machine.SPI类函数详解
【MicroPython】rp2.StateMachine类函数详解
C/C++系列
【C/C++】 Windows教程1——环境搭建
【C/C++】 Windows教程2——创建工程
Arduino IDE 系列
安装Arduino IDE
-
首先到Arduino官网下载Arduino IDE的安装包。
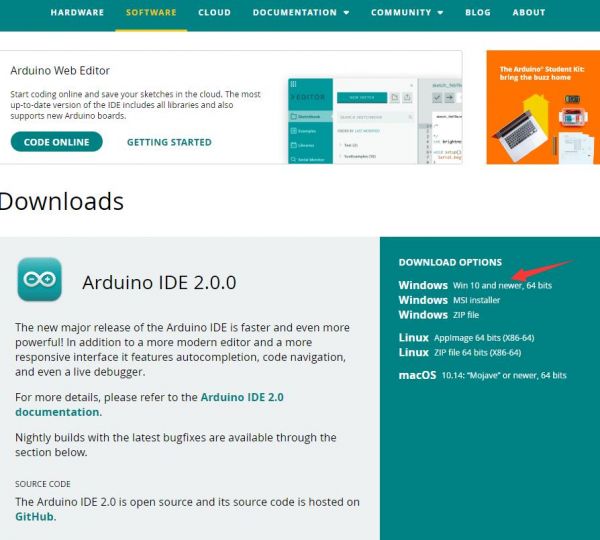
-
这里选择仅下载就可以了。
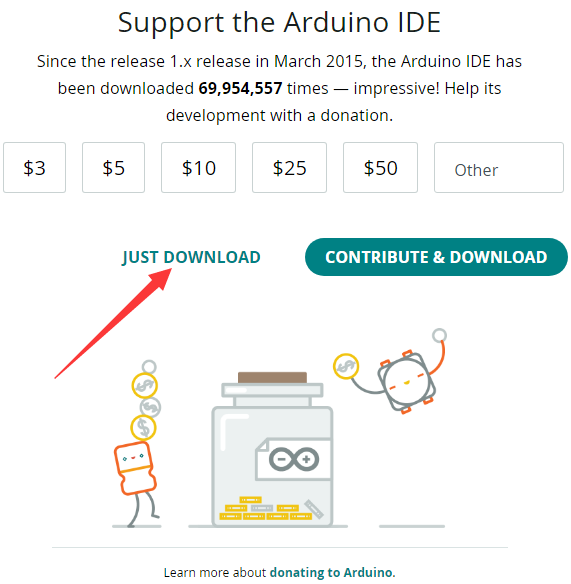
-
下载完成后,点击安装。

注意:安装过程中会提示你安装驱动,我们点击安装即可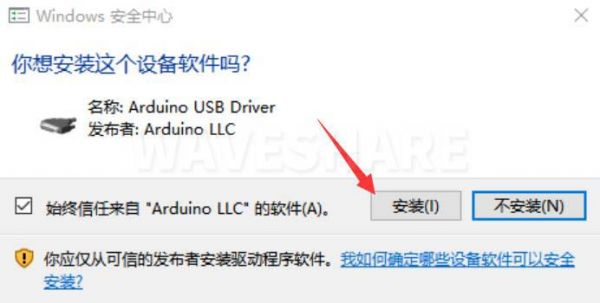




Arduino IDE中文界面
-
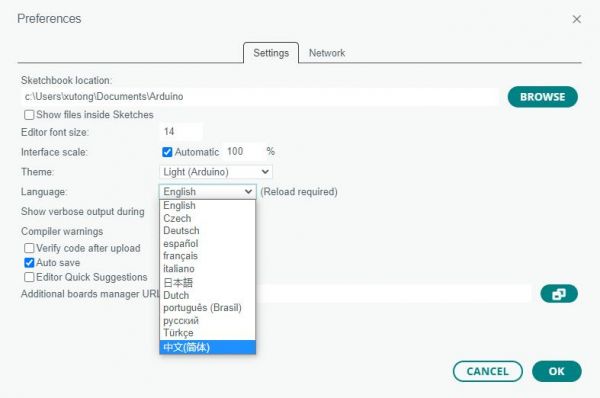
第一次安装完成后,打开Arduino IDE全是英文界面,我们可以在File>Preferences切换成简体中文。
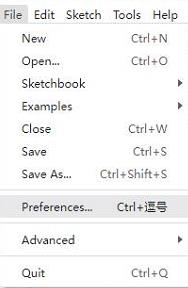
-
在Language里面选择简体中文,点击OK。


在Arduino IDE中安装Arduino-Pico Core
-
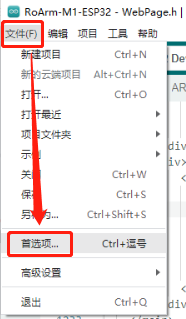
打开Arduino IDE,点击左上角的文件,选择首选项
-
在附加开发板管理器网址中添加如下链接,然后点击OK
https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
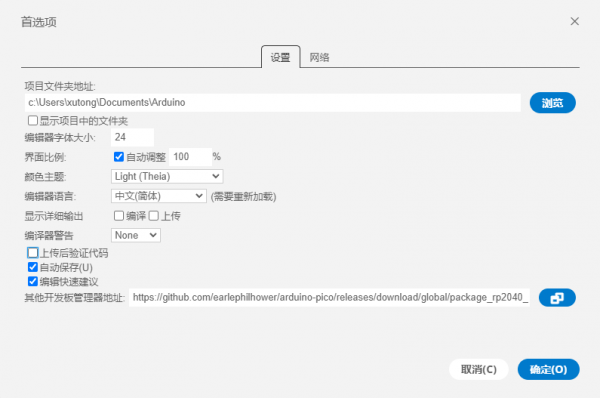
注意:如果您已经有ESP32板URL,您可以使用逗号分隔 URL,如下所示:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
-
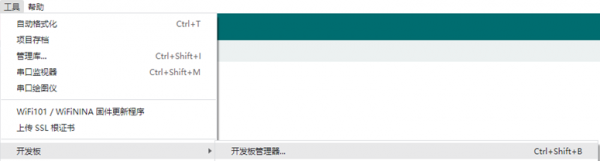
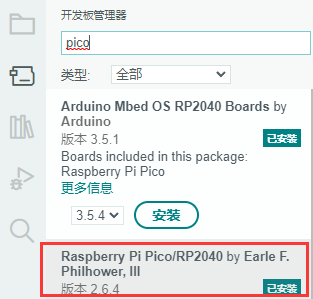
点击工具>开发板>开发板管理器>搜索pico,由于我的电脑已经安装过了,所以显示已安装




国内用户
- 因为网络原因,国内用户连接github并不稳定,我们另外提供了一份安装包,可以跳过在线的过程
- 若已经成功配置了pico环境,可以直接跳过本章
-
下载rp2040压缩包,将解压的rp2040文件夹复制到如下路径下
C:\Users\[username]\AppData\Local\Arduino15\packages
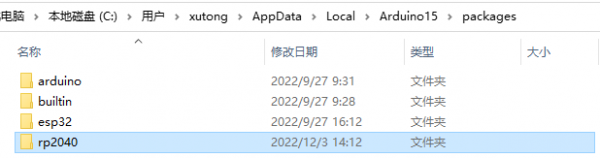
注意:将里面用户名:[username]替换成自己的用户名

第一次上传程序
-
按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。

- 下载程序,打开arduino\PWM\D1-LED路径下的D1-LED.ino
-
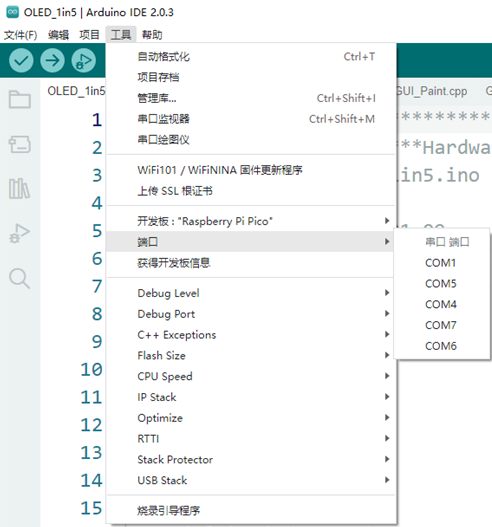
点击工具>端口,记住已有的COM,不需要点击这个COM(不同电脑显示的COM不一样,记住自己电脑上已有的COM)
-
用USB线将驱动板和计算机连接起来,再点击工具>端口,第一次连接选择uf2 Board,上传完成后,再次连接就会多出一个COM口

-
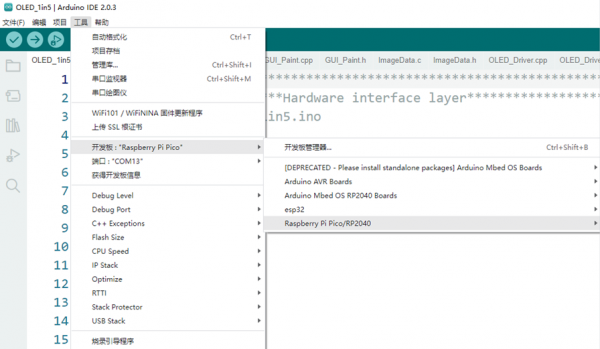
点击工具>开发板>Raspberry Pi Pico/RP2040>Raspberry Pi Pico

- 设置完成后,点击向右箭头上传将程序





{kind=link}
- 如果期间遇到了问题,需要重新安装或者更换Arduino IDE版本时,卸载Arduino IDE需要卸载干净,卸载软件后需要手动删除C:\Users\[name]\AppData\Local\Arduino15这个文件夹内的所有内容(需要显示隐藏文件才能看到) 再重新安装
开源例程
MircoPython视频例程(github)
MicroPython固件/Blink例程(C)
树莓派官方C/C++示例程序 (github)
树莓派官方micropython示例程序 (github)
Arduino官方C/C++示例程序 (github)
Pico使用教程
硬件连接
连接Pico的时候,请注意对应方向不要接反。可以观察模块上有USB丝印的一端与Pico的USB接口一端来判断方向(也可以根据模块上的排母的引脚标号与Pico的引脚标号判断)

程序下载
一:树莓派上直接下载
打开树莓派终端,执行:
sudo apt-get install p7zip-full cd ~ sudo wget https://www.waveshare.net/w/upload/d/d8/Pico-CAN-A-Code.7z 7z Pico_Pico-CAN-A-Code.7z -o./Pico-CAN-A-Code.7z cd ~/Pico-CAN-A-Code
二:在资料栏下点击示例程序直接下载即可
例程使用
python
- 1.按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。
- 2.下载pico_micropython_xxxxx.uf2 文件,复制到识别的可移动盘(RPI-RP2)中
- 3.打开Thonny IDE(注意:要使用最新版本的Thonny,否则是没有Pico的支持包的,当前Windows下的最新版本为v3.3.3)
- 4.点击工具->设置->解释器,如图所示选择Pico及对应的端口

- 5.文件->打开->servo.py,点击运行即可,如图所示说明程序已经运行:

这是一个收发例程,请接上其他的CAN设备(A-A B-B连接),实验现象发送字符串SENDTESTABCD1234,接受另一端CAN返回的字符
资料
文档
程序
开发软件
Pico快速上手
固件下载
| ||
|
文字教程
基础介绍
MicroPython系列
【MicroPython】machine.Pin类函数详解
【MicroPython】machine.PWM类函数详解
【MicroPython】machine.ADC类函数详解
【MicroPython】machine.UART类函数详解
【MicroPython】machine.I2C类函数详解
【MicroPython】machine.SPI类函数详解
【MicroPython】rp2.StateMachine类函数详解
C/C++系列
【C/C++】 Windows教程1——环境搭建
【C/C++】 Windows教程2——创建工程
Arduino IDE 系列
安装Arduino IDE
-
首先到Arduino官网下载Arduino IDE的安装包。
-
这里选择仅下载就可以了。
-
下载完成后,点击安装。
注意:安装过程中会提示你安装驱动,我们点击安装即可
Arduino IDE中文界面
-
第一次安装完成后,打开Arduino IDE全是英文界面,我们可以在File>Preferences切换成简体中文。
-
在Language里面选择简体中文,点击OK。
在Arduino IDE中安装Arduino-Pico Core
-
打开Arduino IDE,点击左上角的文件,选择首选项
-
在附加开发板管理器网址中添加如下链接,然后点击OK
https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
注意:如果您已经有ESP32板URL,您可以使用逗号分隔 URL,如下所示:https://dl.espressif.com/dl/package_esp32_index.json,https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
-
点击工具>开发板>开发板管理器>搜索pico,由于我的电脑已经安装过了,所以显示已安装
国内用户
- 因为网络原因,国内用户连接github并不稳定,我们另外提供了一份安装包,可以跳过在线的过程
- 若已经成功配置了pico环境,可以直接跳过本章
-
下载rp2040压缩包,将解压的rp2040文件夹复制到如下路径下
C:\Users\[username]\AppData\Local\Arduino15\packages
注意:将里面用户名:[username]替换成自己的用户名
第一次上传程序
-
按住Pico板上的BOOTSET按键,将pico通过Micro USB线接到电脑的USB接口,待电脑识别出一个可移动硬盘(RPI-RP2)后,松开按键。
- 下载程序,打开arduino\PWM\D1-LED路径下的D1-LED.ino
-
点击工具>端口,记住已有的COM,不需要点击这个COM(不同电脑显示的COM不一样,记住自己电脑上已有的COM)
-
用USB线将驱动板和计算机连接起来,再点击工具>端口,第一次连接选择uf2 Board,上传完成后,再次连接就会多出一个COM口
-
点击工具>开发板>Raspberry Pi Pico/RP2040>Raspberry Pi Pico
- 设置完成后,点击向右箭头上传将程序
- 如果期间遇到了问题,需要重新安装或者更换Arduino IDE版本时,卸载Arduino IDE需要卸载干净,卸载软件后需要手动删除C:\Users\[name]\AppData\Local\Arduino15这个文件夹内的所有内容(需要显示隐藏文件才能看到) 再重新安装
开源例程
MircoPython视频例程(github)
MicroPython固件/Blink例程(C)
树莓派官方C/C++示例程序 (github)
树莓派官方micropython示例程序 (github)
Arduino官方C/C++示例程序 (github)
FAQ
技术支持
联系人:彭工
EMAIL:2851966006@qq.com
电话:0755-83040712
QQ:2851966006
微信:扫下方二维码添加
